

A claw-pair-grabbing type caterpillar track wall-climbing robot
A technology of a wall-climbing robot and a crawler mechanism, which is applied to crawler vehicles, motor vehicles, transportation and packaging, etc., can solve the problems of slow crawling speed, fast crawling speed, and small adhesion area, and achieves improved stability and large load capacity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
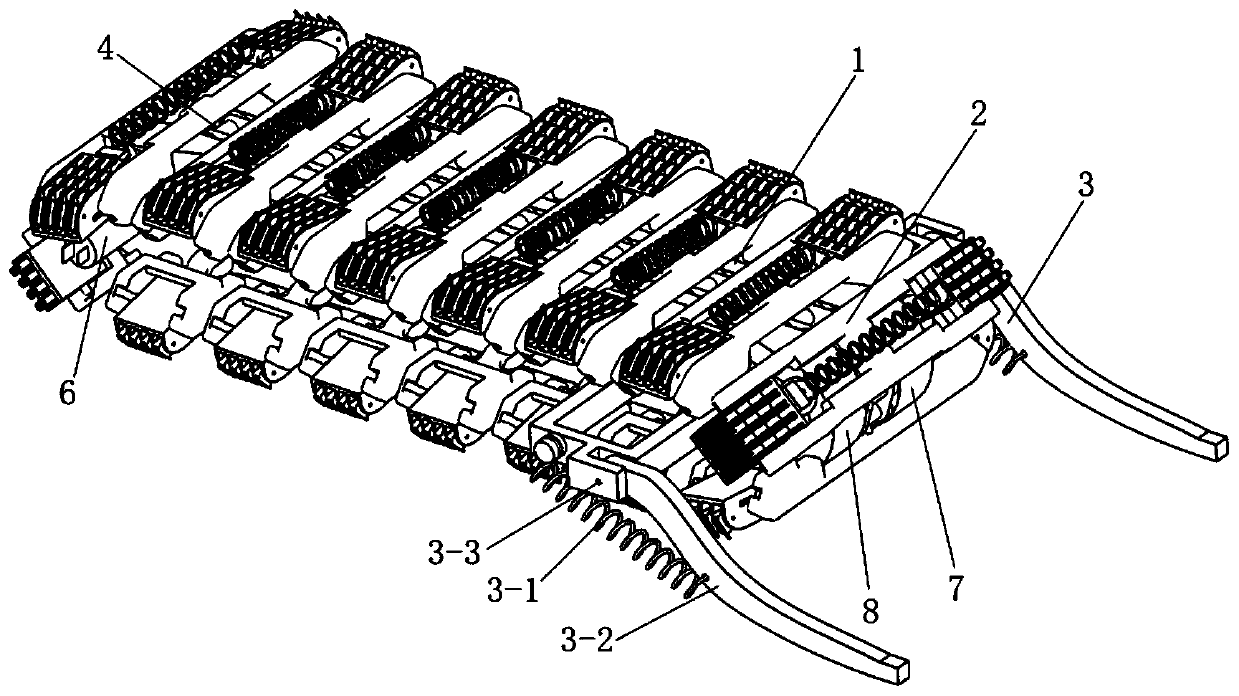
[0036] The present invention is a claw-to-grab crawler wall-climbing robot, such as figure 1 As shown, one end of the robot body 1 is provided with a motor 6, the motor 6 is installed on the motor mount 5, and the output shaft of the motor 6 is connected with a sprocket 4; the opposite sides of the other end of the robot body 1 are respectively provided with elastic tails 3 ; The robot body 1 is also equipped with claws and thorns to grasp the crawler mechanism 2, and the claws and thorns to grasp the crawler mechanism 2 and connect to the sprocket wheel 4.
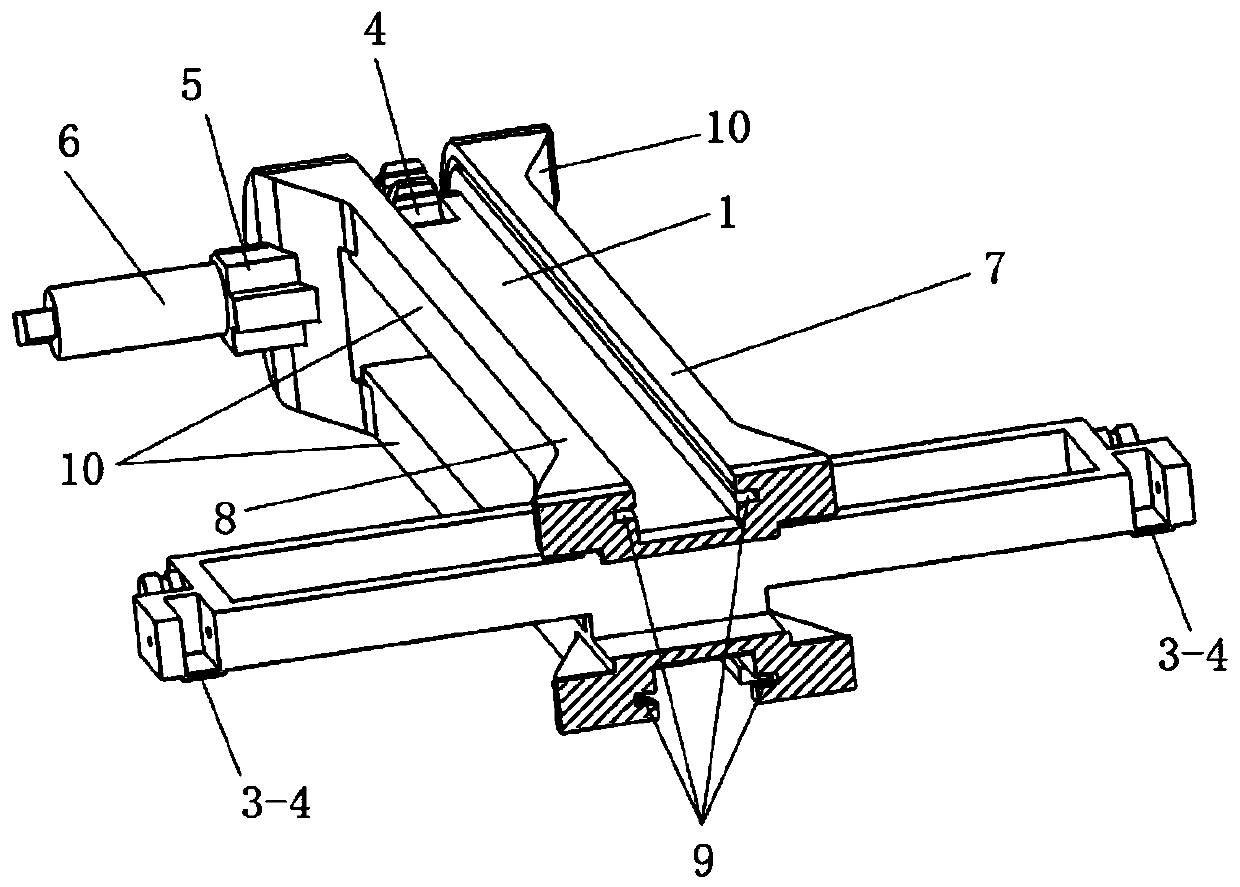
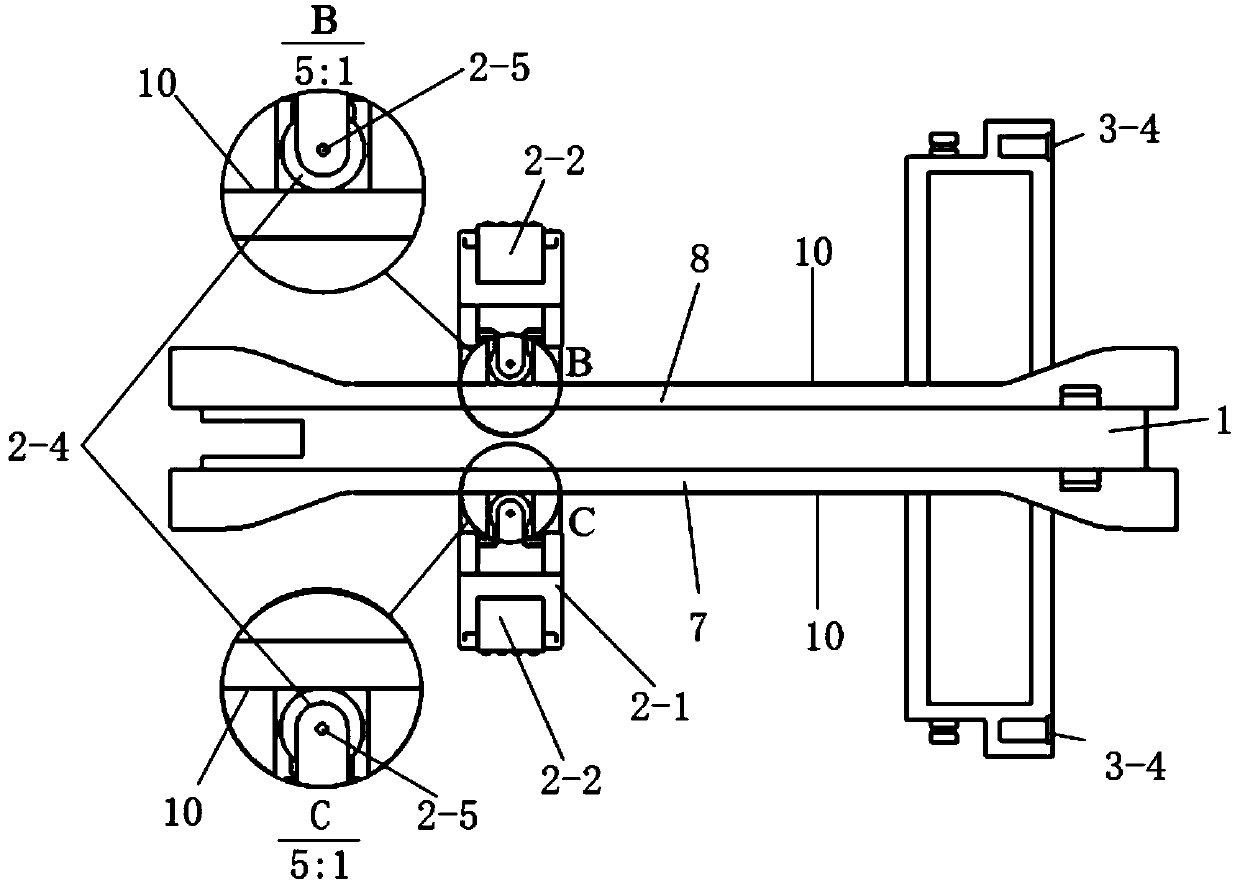
[0037] like figure 2 , 3 , 4, the robot body 1 is provided with guide rail support A7 and guide rail support B8 in parallel, and the relative inner sides of guide rail support A7 and guide rail support B8 guide guide rails 9; the opposite two outer sides of guide rail support A7 and g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More