

Robot interaction method realized by multiple technologies
An interaction method and robot technology, applied in the field of robot interaction based on mathematical translation algorithm, can solve the problems of low accuracy and failure to guarantee that the robot will automatically face customers, so as to improve the chance of interaction, improve efficiency, and reduce the amount of data Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings.
[0019] The robot interaction method implemented by multiple technologies in this embodiment can be used as: 1. Seize the curiosity of customers and actively establish communication opportunities with customers; 2. Actively face customers and show customers some information that attracts customers' attention; 3. Use head movements to show the robot's activity, rather than make customers feel that it is just a machine.
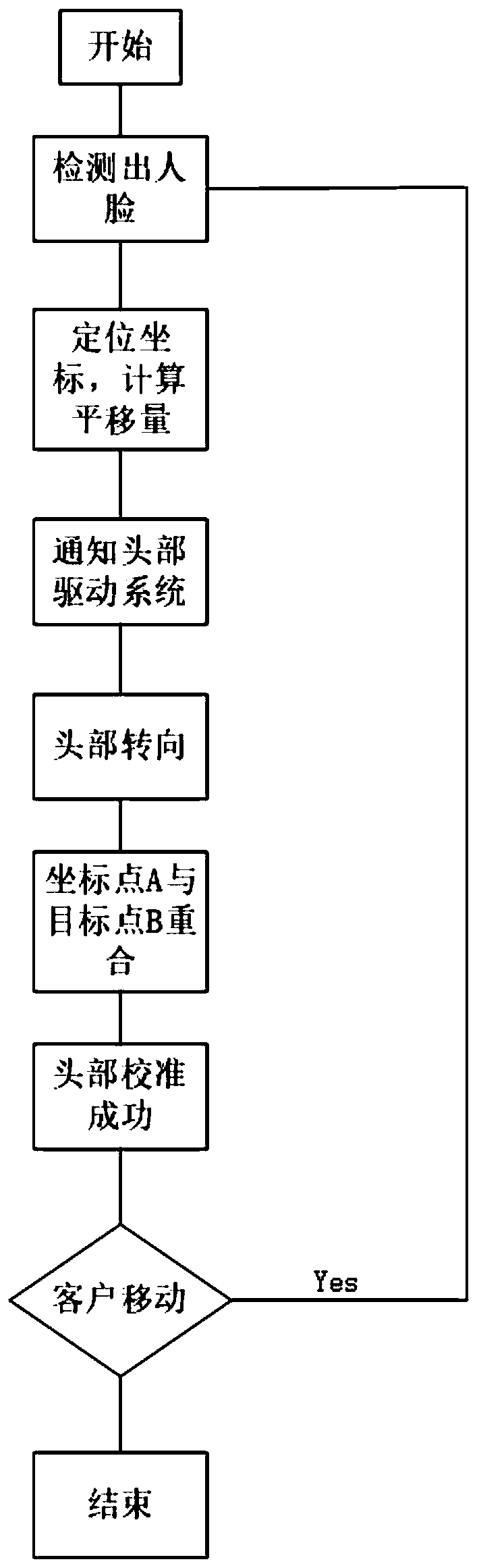
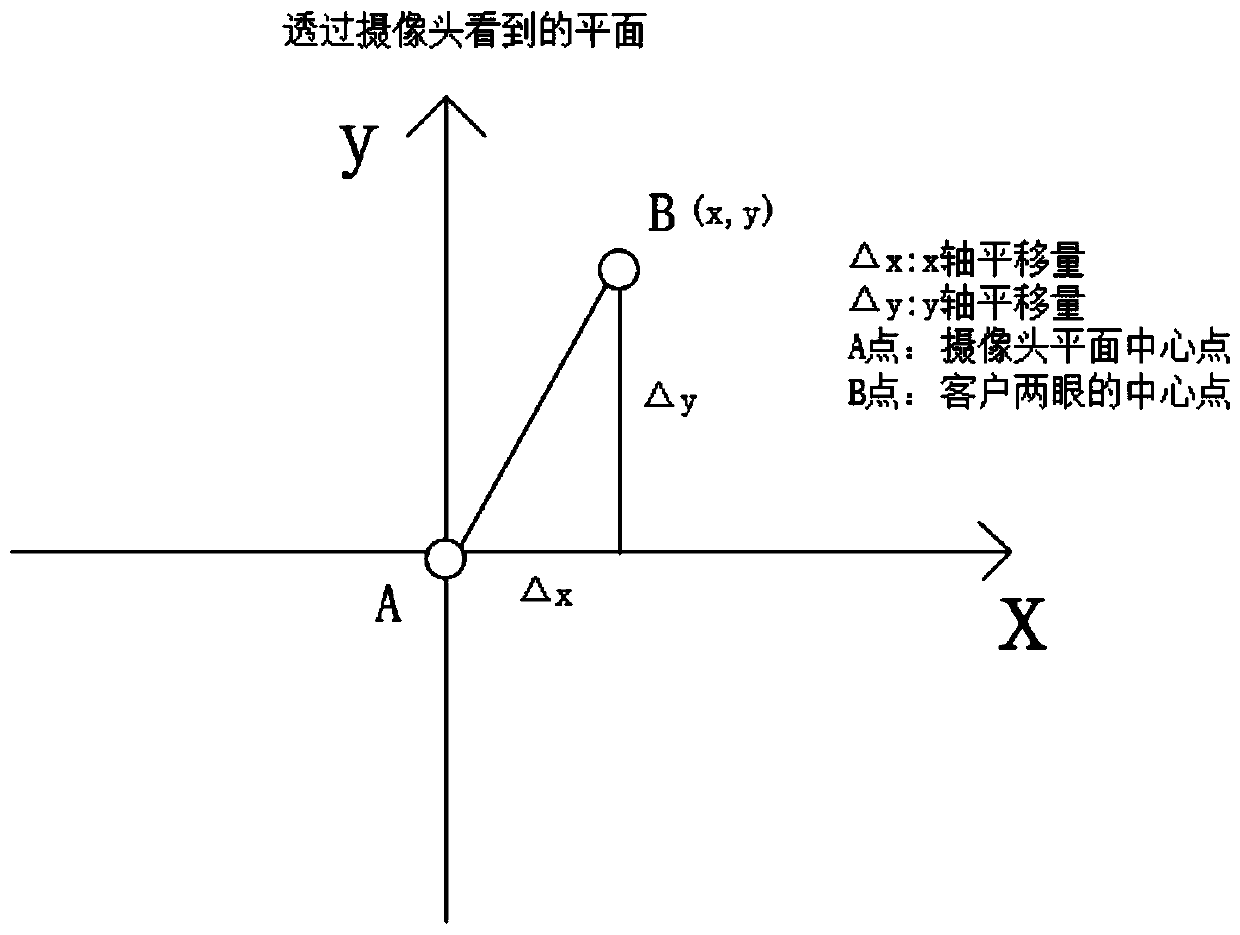
[0020] Such as figure 1 As shown, to complete the function of the robot facing the customer, first we need to let the robot see the customer, and the robot sees the customer through the camera, and the installation position of the camera on the robot is fixed, so create a coordinate system The best base point of the origin is the center point position of the picture pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More