

Real-time collision prevention and target tracking method for unmanned ship
A target tracking and unmanned boat technology, applied in the field of unmanned boat path planning, can solve problems such as path unreachable, time series information unmanned boat motion constraints are not considered, and the controller cannot follow
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings.
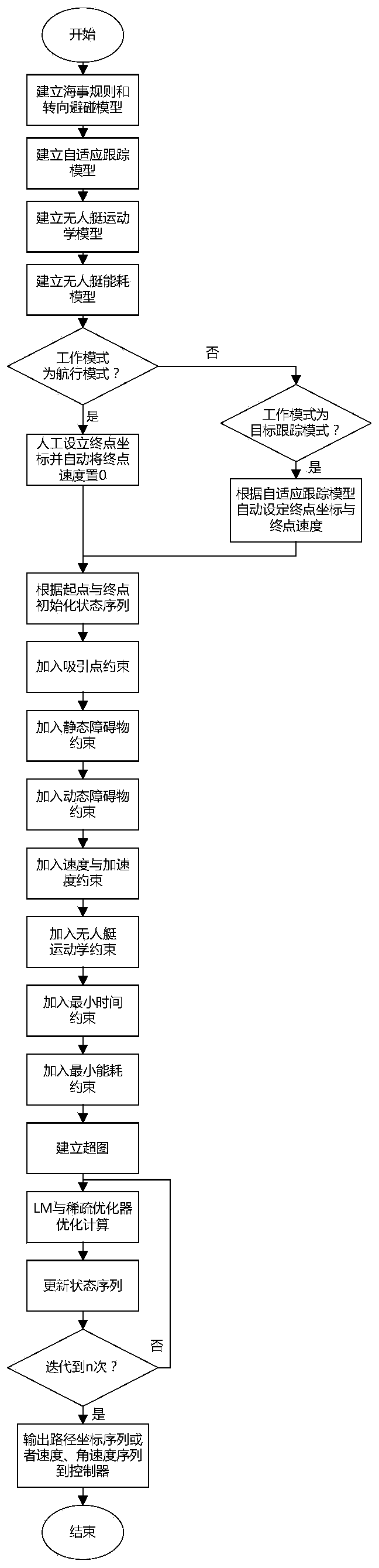
[0079] Embodiments of the present invention provide a real-time collision avoidance and target tracking method for unmanned boats, the implementation process of which is as follows figure 1 shown, including the following steps:
[0080] Preparations: The starting point of the unmanned vehicle and the position, speed, and attribute information of obstacles are known.
[0081] Step S10, according to the starting point and end position of the unmanned ship's navigation track, according to the time interval and the number of state sequences, initialize the state B with time series:=(Q,τ),
[0082] Among them: state set Q={q i} i=1...n ,n∈N, state set τ={ΔT j} j=1...n-1 ,n∈N,q i =(p i ,β i ) T =(x i ,y i ,β i ) T ,p i =(x i ,y i ) is the current position coordinates of the unmanned boat in the map, β i is the current ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More