

A real-time collision avoidance and target tracking method for unmanned boats
A target tracking and unmanned boat technology, which is applied in the field of unmanned boat path planning, can solve the problems of unreachable path, no consideration of time-series information unmanned boat motion constraints, and inability of the controller to follow, etc. The effect of smooth speed tracking and increased working time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0078] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings.
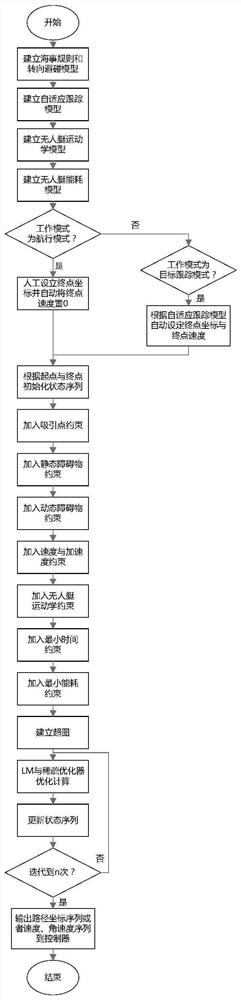
[0079] Embodiments of the present invention provide a real-time collision avoidance and target tracking method for unmanned boats, the implementation process of which is as follows figure 1 shown, including the following steps:
[0080] Preparations: The starting point of the unmanned vehicle and the position, speed, and attribute information of obstacles are known.
[0081] Step S10, according to the starting point and end position of the unmanned ship's navigation track, according to the time interval and the number of state sequences, initialize the state B with time series:=(Q,τ),
[0082] Among them: state set Q={q i} i=1...n ,n∈N, state set τ={ΔT j} j=1...n-1 ,n∈N,q i =(p i ,β i ) T =(x i ,y i ,β i ) T ,p i =(x i ,y i ) is the current position coordinates of the unmanned boat in the map, β i is the current ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More