Automatic driving control method
An automatic driving control and automatic driving technology, applied in non-electric variable control, control/regulation system, two-dimensional position/channel control and other directions, can solve problems such as low accuracy, reduced obstacle description accuracy, safety accidents, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
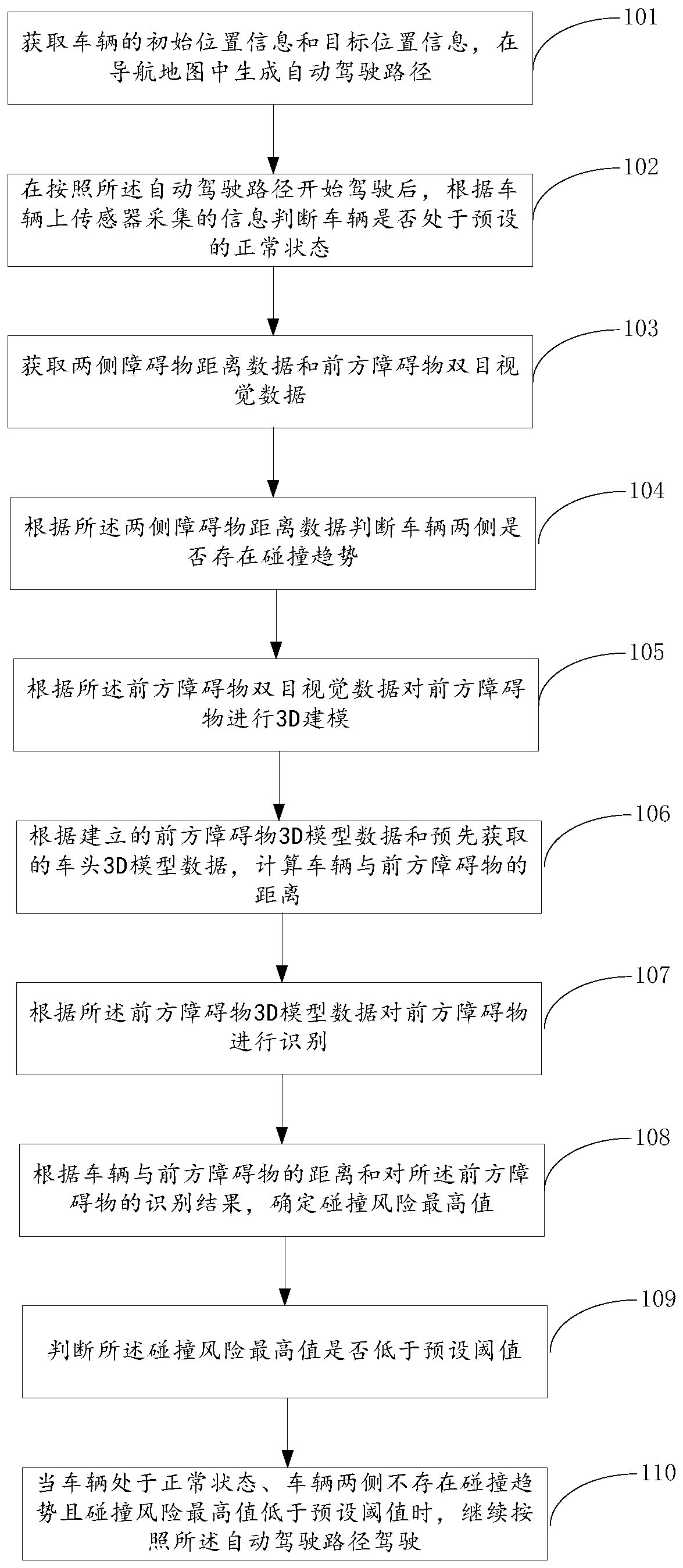
[0041] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
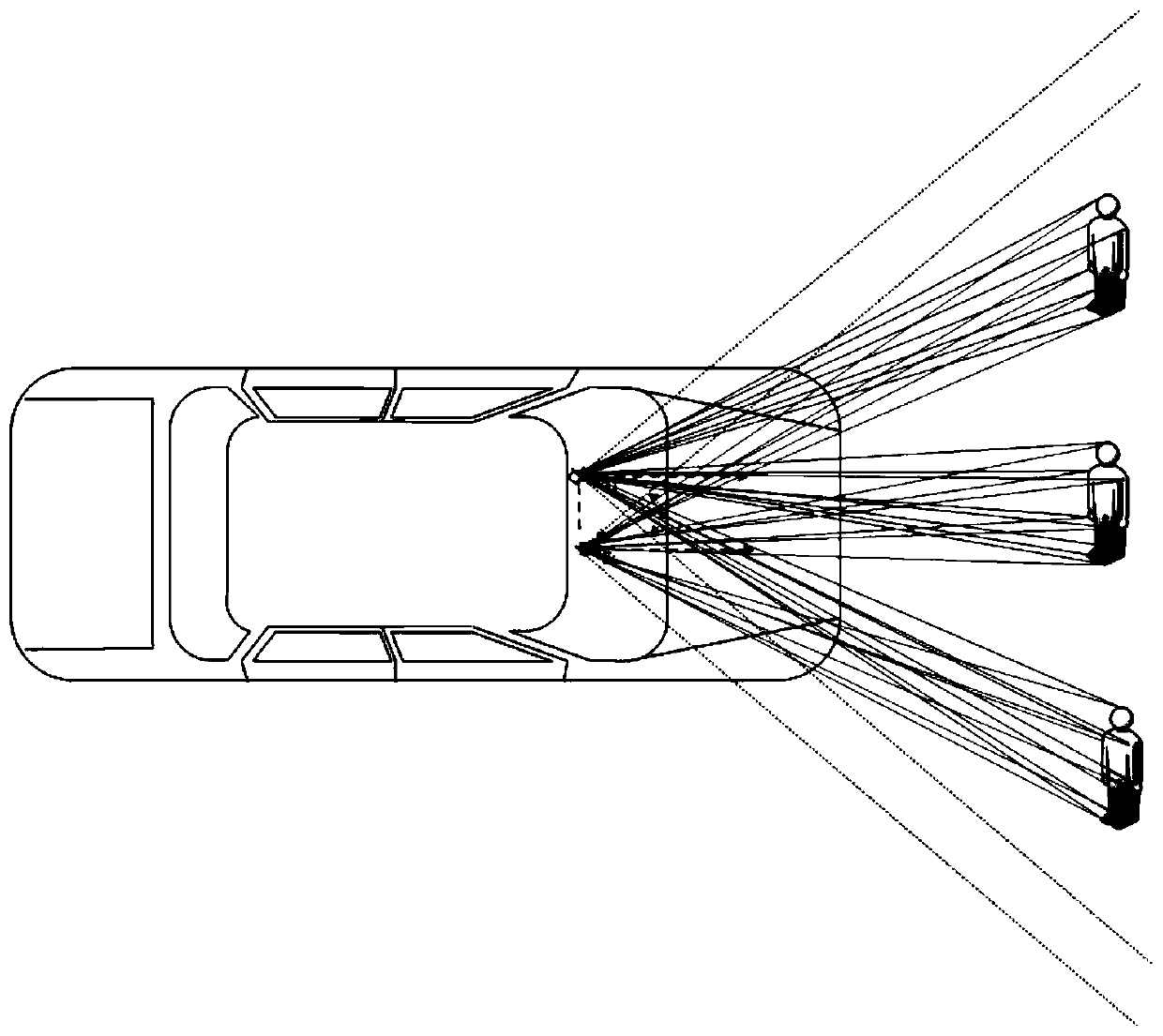
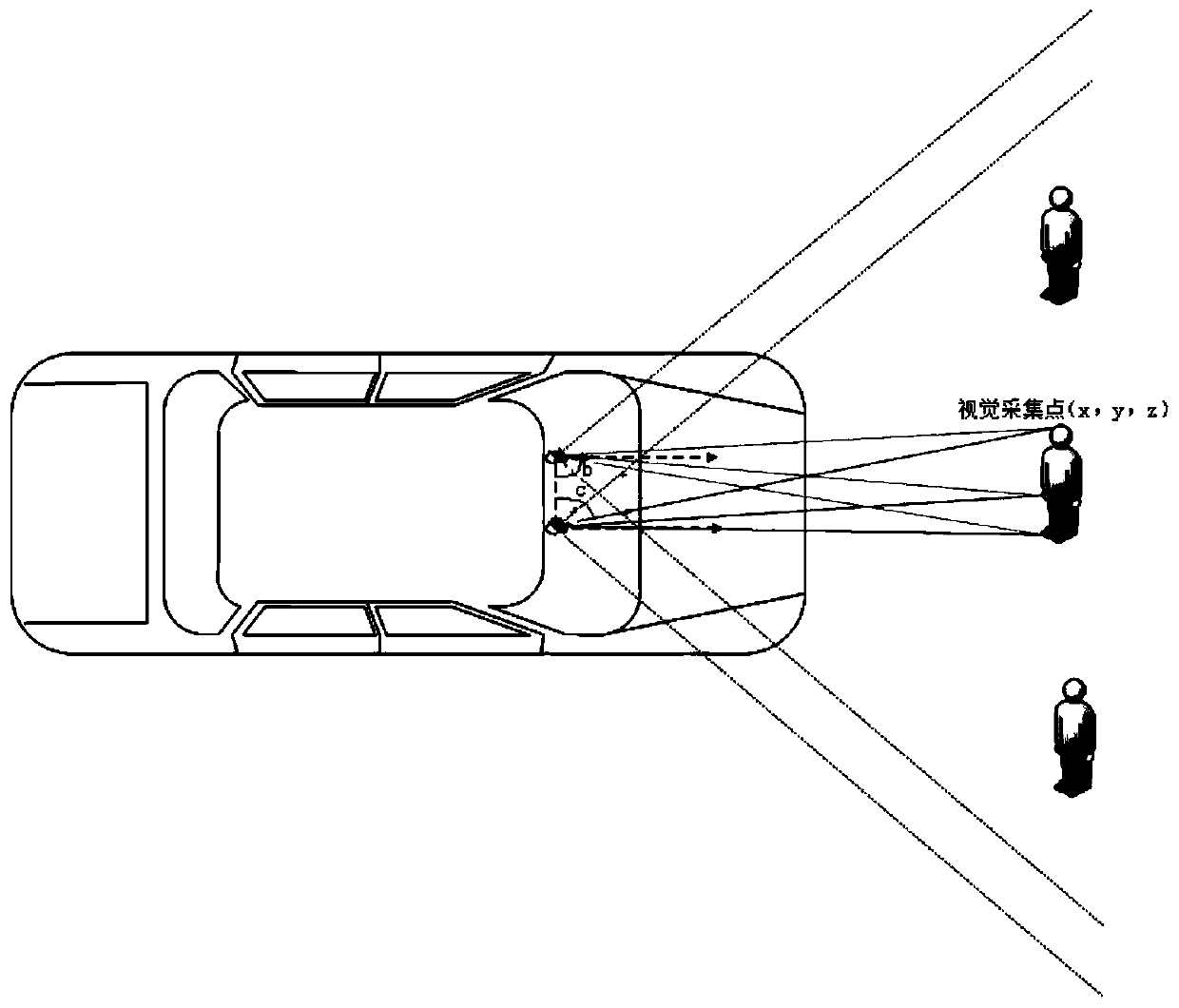
[0042] An embodiment of the present invention provides an automatic driving control method, which is executed by a Xilinx heterogeneous processor that meets the vehicle specification level, realizes real-time processing of data collected by various sensors on the vehicle, and is based on the existing sensors on the vehicle , using at least one set of global shutter-based binocular vision sensors to collect binocular vision data of obstacles ahead, and perform 3D modeling of obstacles ahead based on binocular vision data, not only can obtain a clear and accurate 3D view of obstacles ahead Model data can also solve the problem of low frame transmission of the existing front camera. This method can not only meet the precision required by self-driving vehicles, but also transmit the collected data back to the processor in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More