

A Motion Planning Method for UAV Obstacle Avoidance in Cruising Missions
A motion planning, UAV technology, applied in non-electric variable control, three-dimensional position/channel control, instruments, etc., can solve problems such as insufficient ability to deal with sudden obstacles, complex calculation of UAV obstacle avoidance methods, etc. The effect of planning speed and response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The drawings constituting a part of the present invention are used to provide a further understanding of the present invention, and the schematic embodiments and descriptions of the present invention are used to explain the present invention, and do not constitute an improper limitation of the present invention.
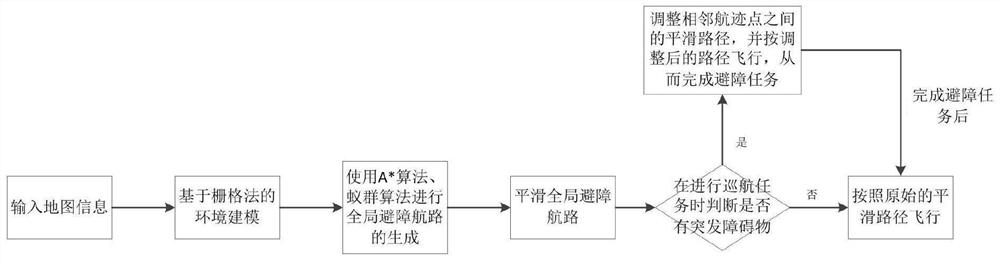
[0044] This embodiment provides a motion planning method for unmanned aerial vehicle obstacle avoidance under the cruising task, the method is as attached figure 1 As shown, firstly, the task environment (the scope of the cruise task) is modeled, and the task environment is divided into units by using the grid method, and the length of the minimum turning radius of the UAV is selected twice as the grid size. On the one hand, this can Satisfying the kinematic constraints of the UAV, on the other hand, can make the generated path smoother and feasible.
[0045] On the basis of the digital map, the collision risk scoring is carried out for each divided grid, and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More