

Method for quickly planning and mixing paths on basis of A-star algorithms
A fast path and algorithm technology, applied in the directions of road network navigators, measuring devices, instruments, etc., can solve problems such as large search space, long time consumption, and low solution efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention more clear, the technical solutions in the embodiments of the present invention are clearly and completely described below in conjunction with the drawings in the embodiments of the present invention:
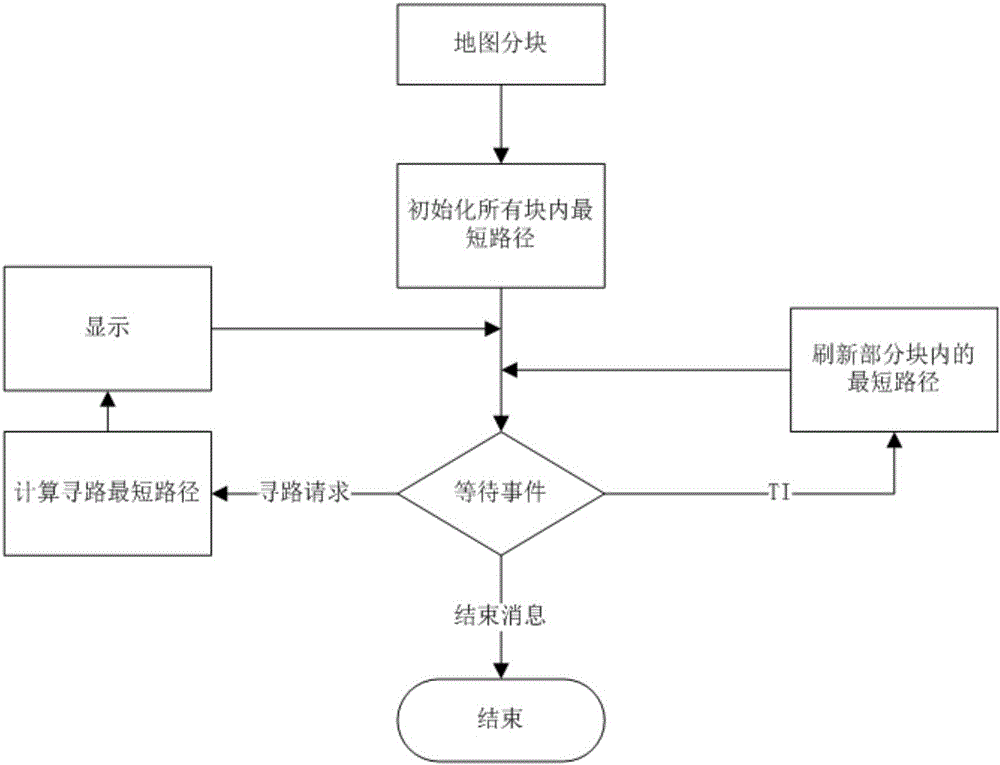
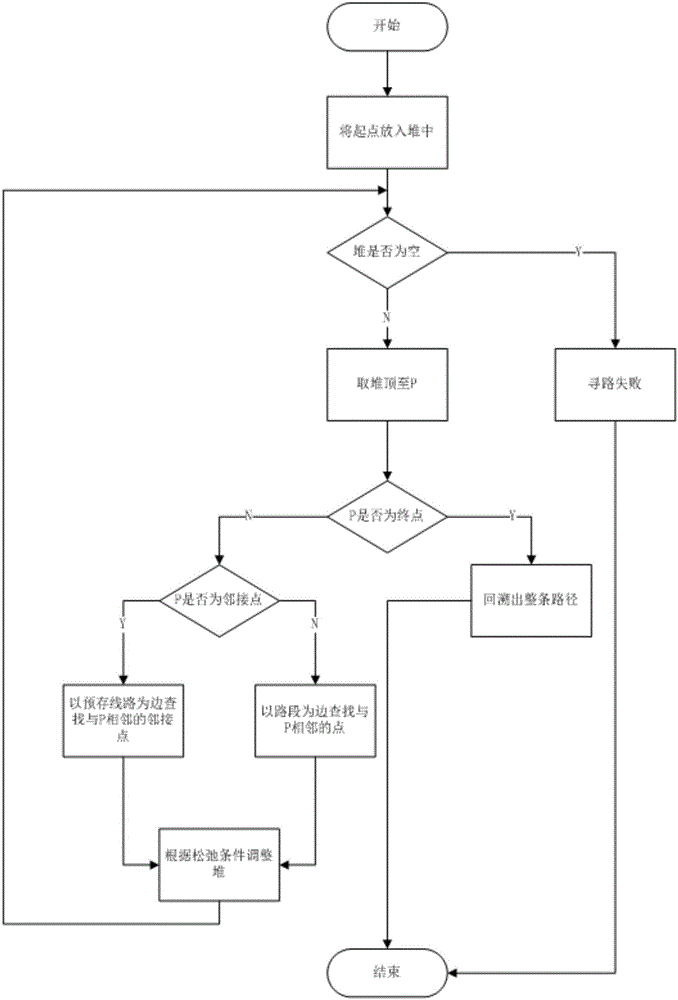
[0036] like figure 1 ‐5 shows: a fast path planning hybrid method based on the A‐Star algorithm, which mainly includes the following steps:
[0037] First, the target map is divided into multiple map blocks of equal size according to the longitude and latitude lines, and each map block is the area enclosed by the longitude and latitude lines.
[0038] t i (i∈Z, and 0≤i≤n) is the dimension of the i-th dividing parallel, where t 0 = -85°, t n = 85°;
[0039] g j (j∈Z, and 0≤i≤n) is the accuracy of the j-th segmented police rank, where g 0 = -180°, g m = 180°;
[0040] t i and g j Represents latitude and longitude lines.
[0041] have t i+1 -t i =T, wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More