

Method and system for realizing simulated scene tracking based on picture tracking
A picture and scene technology, applied in image enhancement, image analysis, image data processing, etc., can solve the problems of large collection volume, inaccurate positioning, and long time-consuming preparation for identifying images, achieving strong universality without affecting the running speed. , the effect of the excellent tracking effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
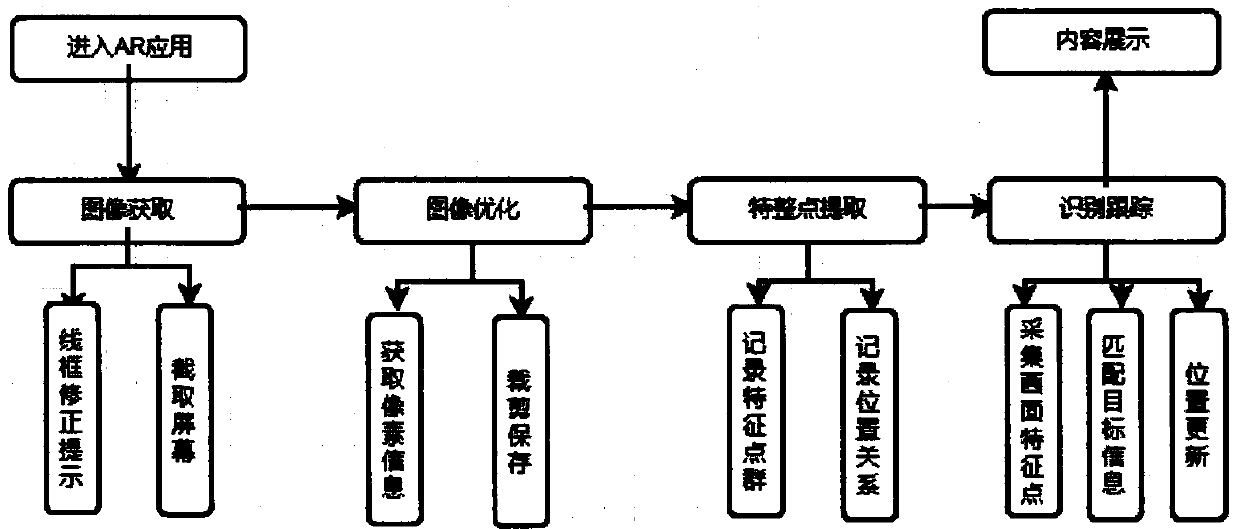
[0045] In the embodiment of the present invention, such as figure 1 As shown, the present invention provides a method for realizing simulation scene tracking based on picture tracking, comprising the following steps:
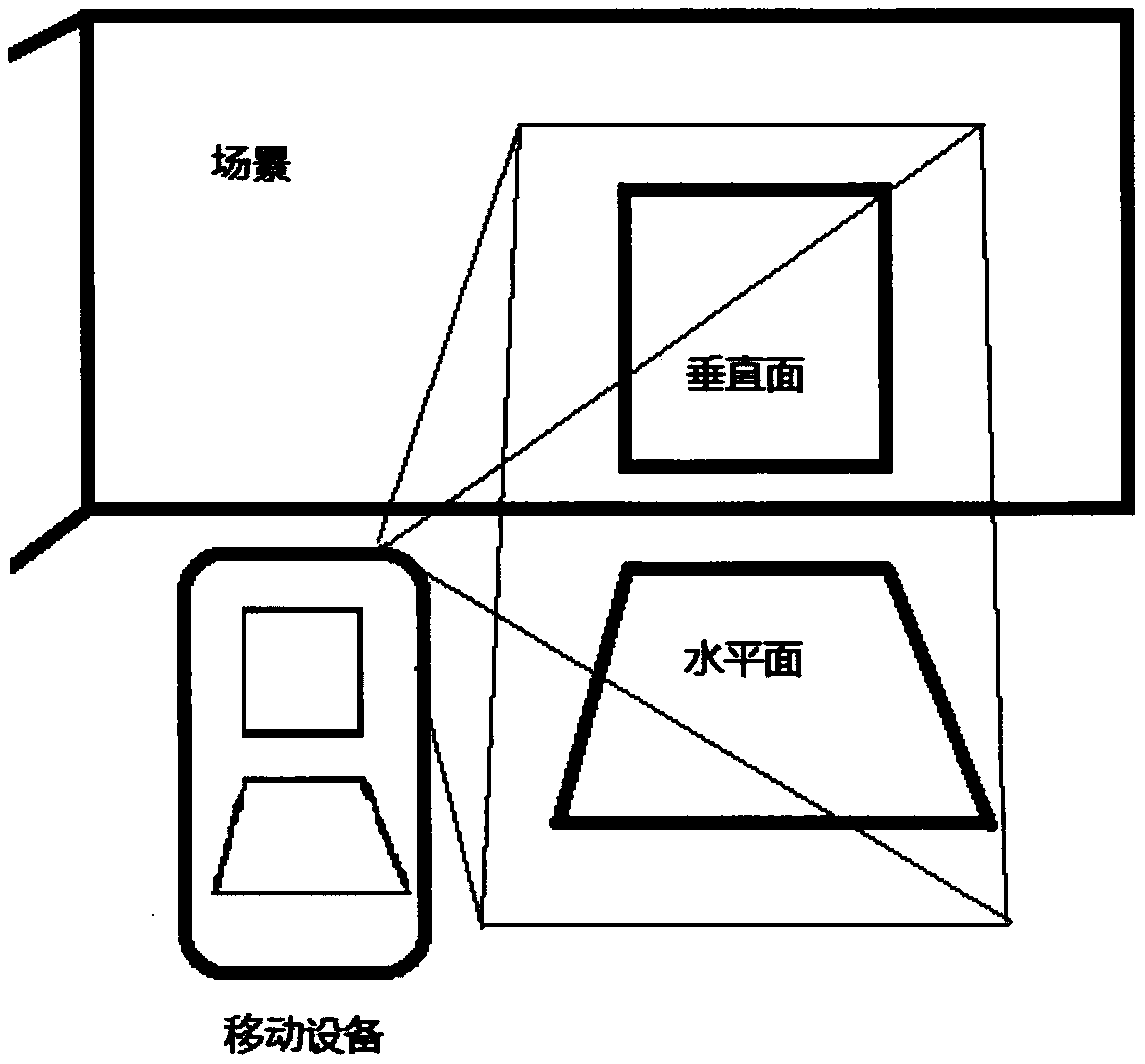
[0046] Step S1, image acquisition: capture the scene image for making a target image for identification and tracking, identify the vertical plane and / or horizontal plane of the three-dimensional space by analyzing the scene image, and take a screenshot to obtain the image content;
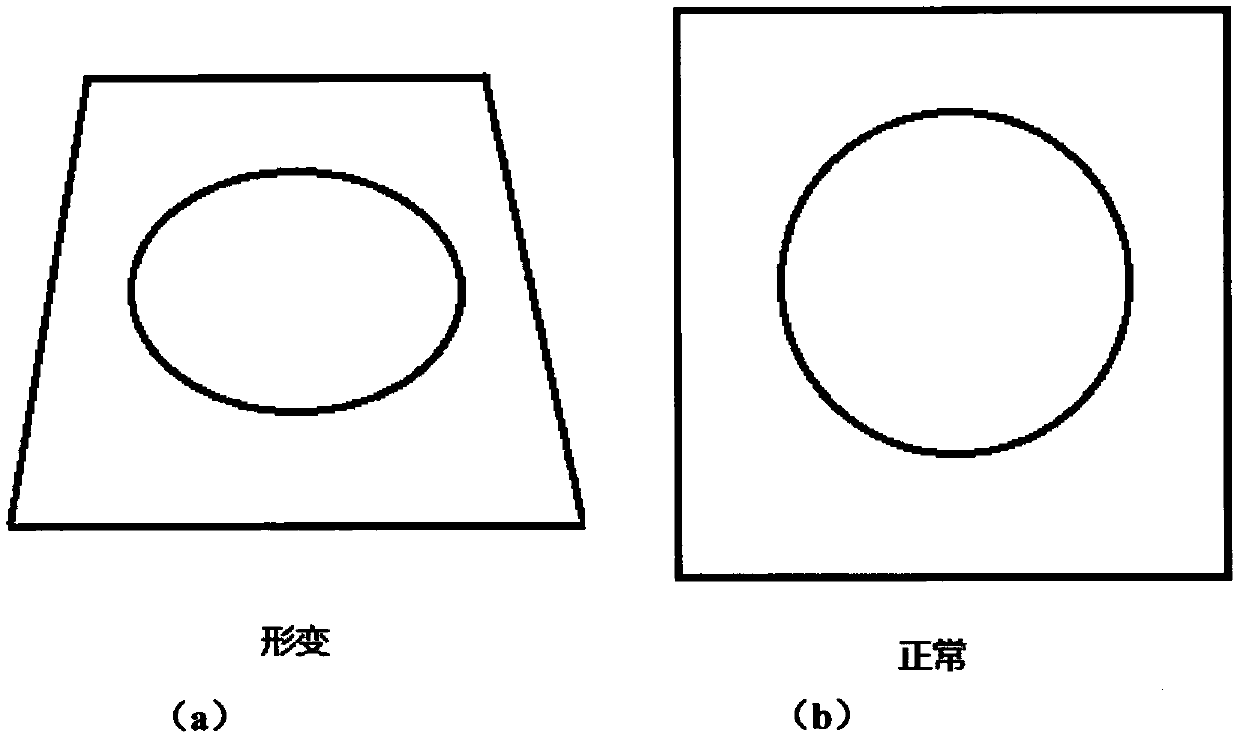
[0047] In this step, enter the AR application of the terminal device to capture the scene image, the purpose is to make the target image for recognition and tracking, but the image obtained by the screenshot is a 2D mapping image in a three-dimensional space, in order to ensure the same tracking effect as the 2D mapping image, it needs to be taken out For part of the content in the image, only keep the content of one surface, such as the horizontal plane and vertical plane, such as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More