

A method of autonomous navigation under space-time map based on multi-target tracking and prediction
A multi-target tracking and autonomous navigation technology, applied in the field of autonomous navigation under the space-time map based on multi-target tracking and prediction, can solve the problems that cannot overcome the influence of dynamic targets, increase the difficulty of planning, etc., and achieve multi-category semantic target recognition and tracking , improve planning efficiency, and simplify the effect of dynamic programming problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below with reference to the accompanying drawings and examples.
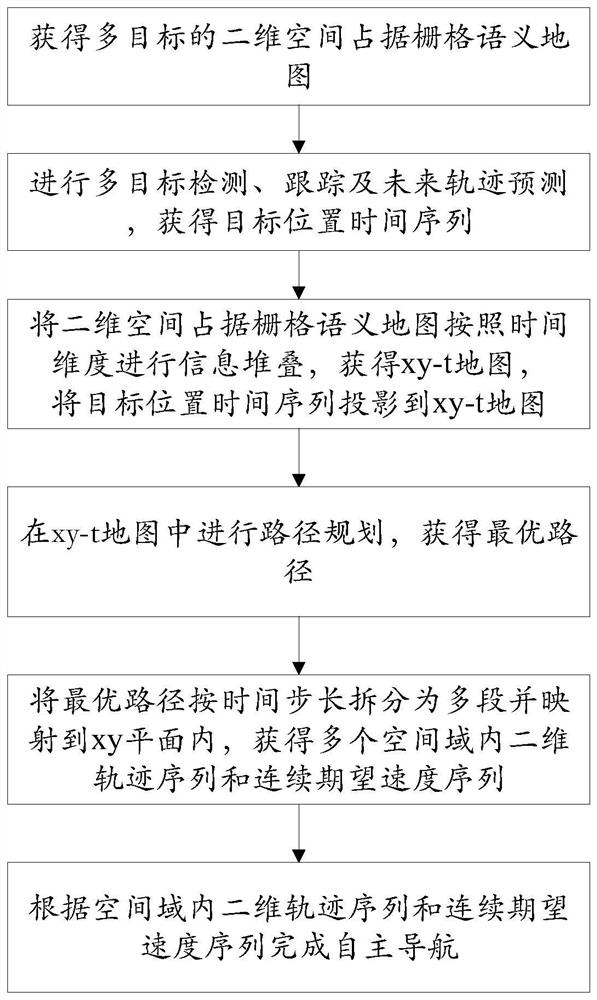
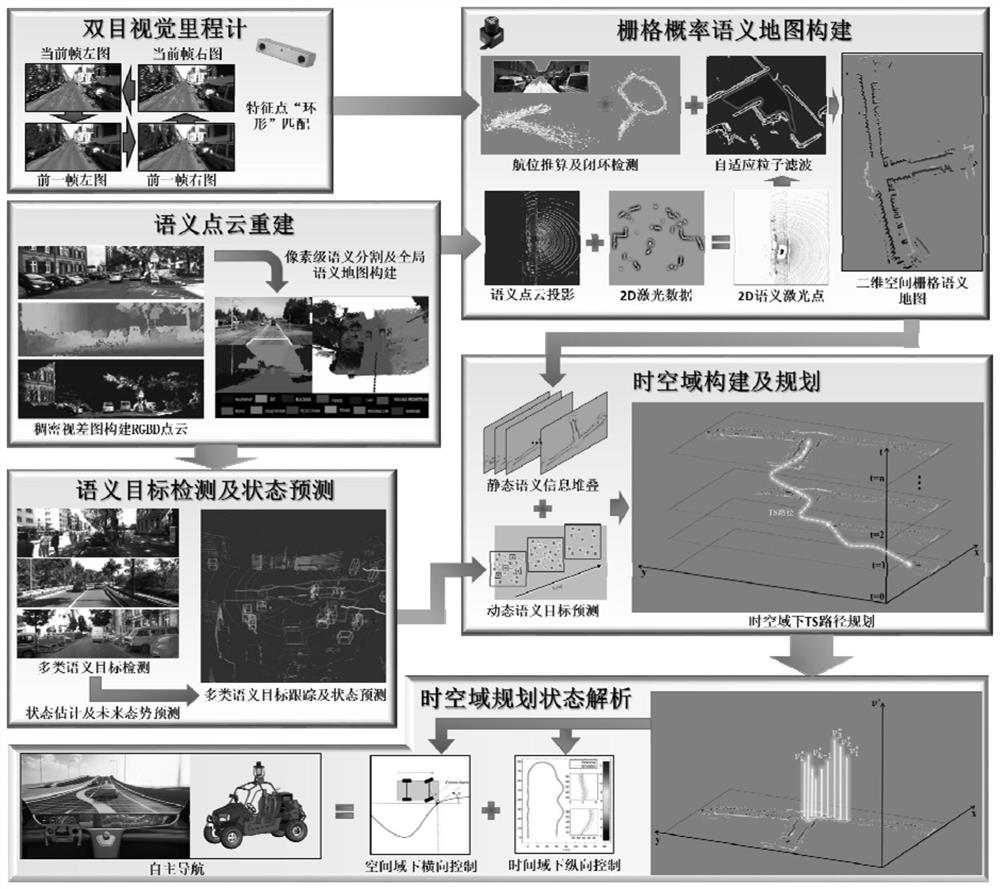
[0027] The invention raises the automatic driving problem to the space-time dimension, can organically unify the static environment information and the dynamic target information, and converts the dynamic programming problem in the two-dimensional environment into the static programming problem in the three-dimensional space-time dimension. It can be seen that the construction of a spatio-temporal navigation map that includes the time dimension plays a vital role in the path planning or autonomous decision-making of robots or intelligent vehicles in a dynamic environment. Effective state analysis based on the constructed spatio-temporal navigation map can realize dynamic environment Efficient simplification of the autonomous programming problem under .
[0028] In the following, the unmanned vehicle is used as the navigation object for description. The in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More