Robot safety control method, device, equipment and storage medium
A safety control and robot technology, applied in the field of robots, can solve the problems of unable to stop the motor, unable to control the motor through commands, single control method, etc., to achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
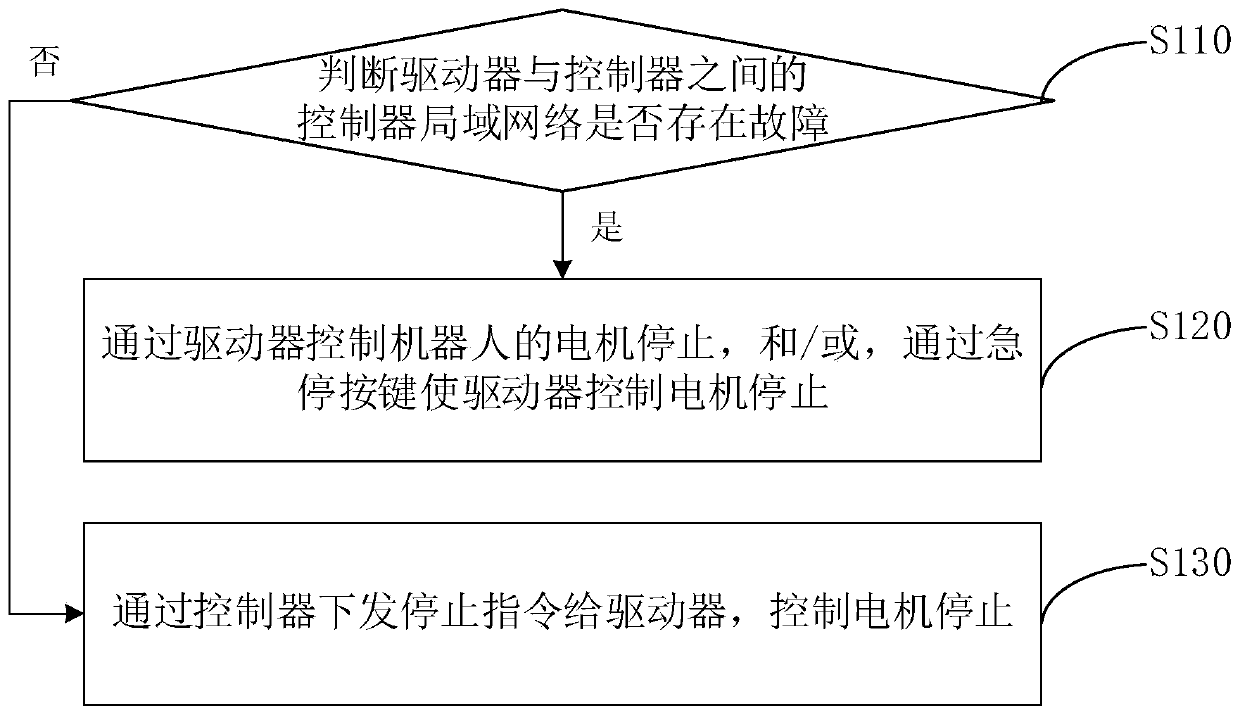
[0035] figure 1 It is a flow chart of the robot safety control method in Embodiment 1 of the present invention. This embodiment is applicable to the situation of realizing safety control on the robot motor. The method can be executed by the robot safety control device, which can use software and / or hardware The device can be configured in a device, which can be a robot or other intelligent device.
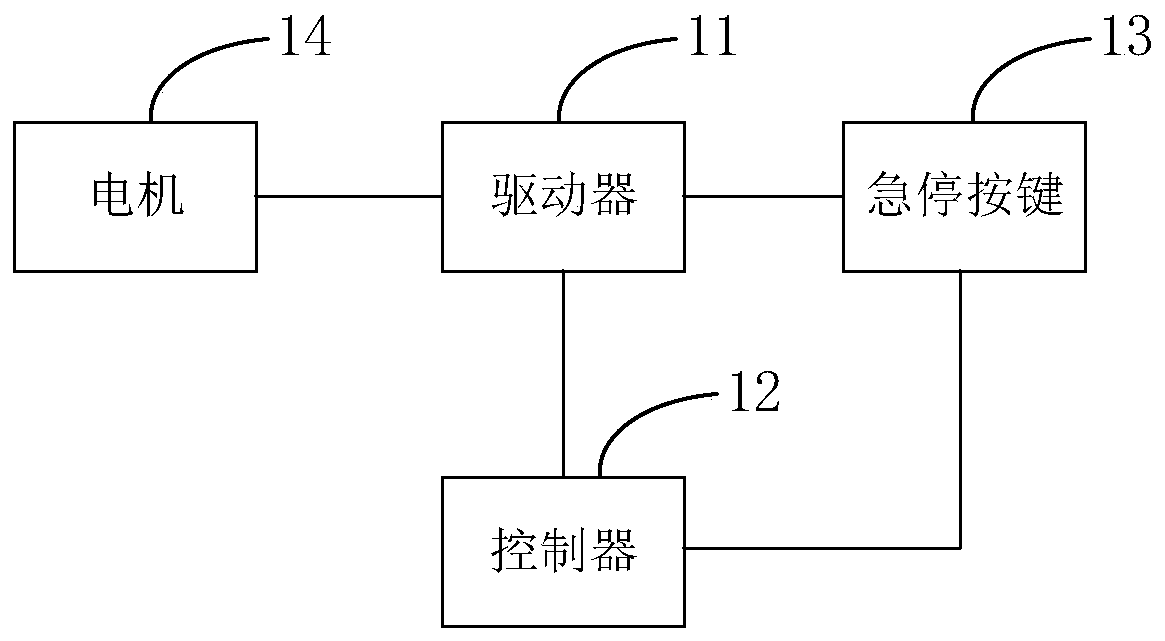
[0036] figure 2 It is a schematic diagram of the safety control circuit of the robot in Embodiment 1 of the present invention. The driver 11, the controller 12, the emergency stop button 13 and the motor 14 in the figure are all hardware devices provided on the robot. The emergency stop button 13 can be connected to the input / output (I / O) port of the driver 11 and the controller 12 respectively, and the driver 11 can be connected to the controller 12 through a Controller Area Network (CAN). The driver 11 is connected with the motor 14 and can control the motor 14 to stop. The c...
Embodiment 2
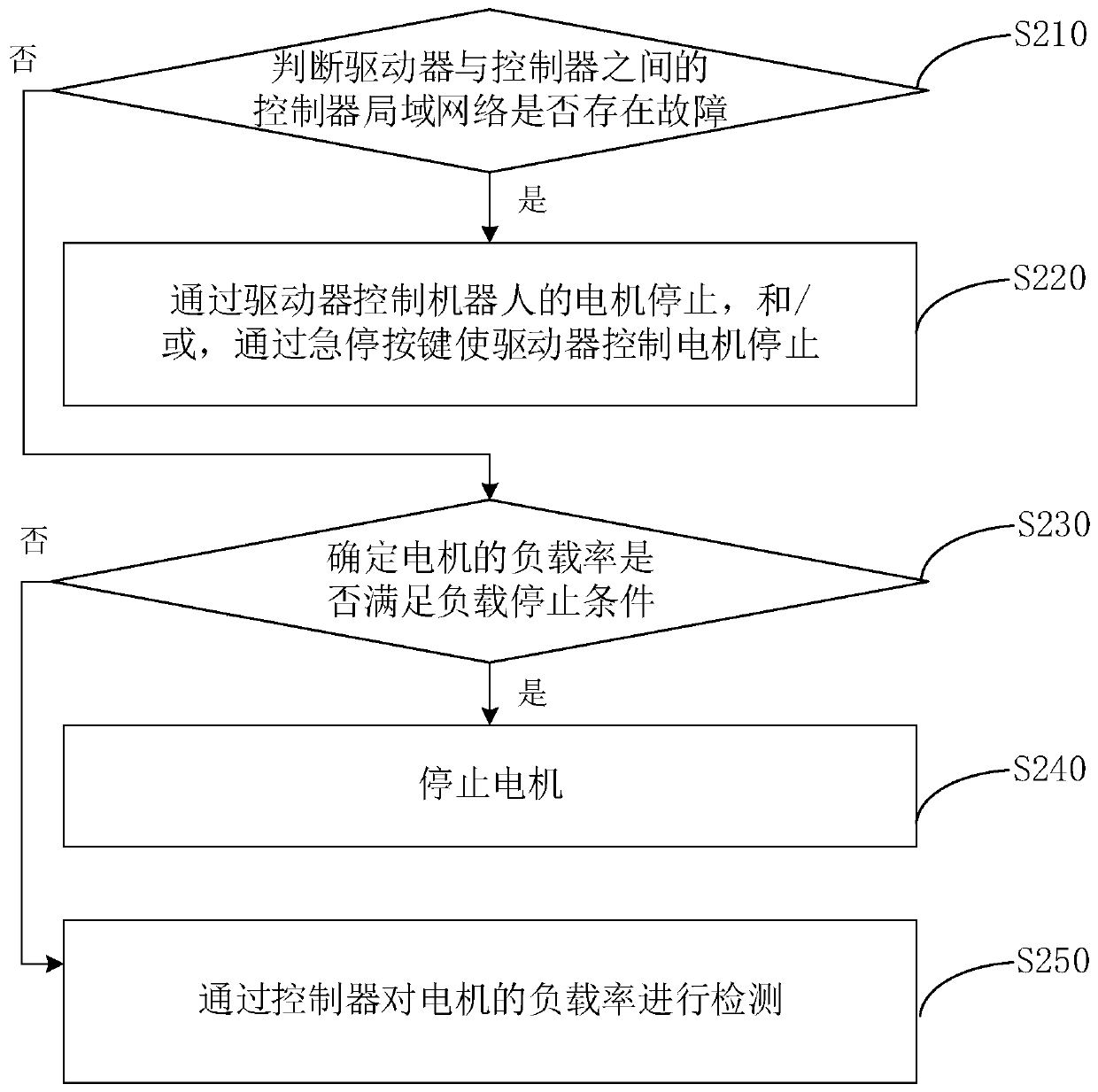
[0053] image 3 It is a flow chart of the robot safety control method in the second embodiment of the present invention. On the basis of the foregoing embodiments, this embodiment further optimizes the foregoing robot safety control method. Correspondingly, such as image 3 As shown, the method of this embodiment specifically includes:
[0054] S210. Determine whether there is a fault in the controller area network between the driver and the controller.
[0055] Specifically, judging whether there is a fault in the controller local area network between the driver and the controller may include: according to whether the driver receives the heartbeat frame sent by the controller within the set time, judging the controller local area network between the driver and the controller whether there is a fault in the network.
[0056] If the controller local area network between the drive and the controller has a fault, S220 may be executed; if the controller local area network betw...
Embodiment 3
[0068] Figure 4 It is a schematic structural diagram of the robot safety control device in the third embodiment of the present invention, and this embodiment is applicable to the situation of realizing safety control on the robot motor. The robot safety control device provided by the embodiment of the present invention can execute the robot safety control method provided by any embodiment of the present invention, and has corresponding functional modules and beneficial effects for executing the method.
[0069] The device specifically includes a fault judgment module 310 and a stop module 320, wherein:
[0070] A fault judging module 310, configured to judge whether there is a fault in the controller local area network between the driver and the controller;
[0071] The stop module 320 is used to stop the motor of the robot controlled by the driver if there is a fault in the controller local area network between the driver and the controller, and / or to stop the driver to con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More