A robot tcp calibration method based on vertical reflection
A calibration method and vertical reflection technology, applied in the directions of instruments, manipulators, measuring distances, etc., can solve problems such as inefficiency and collision, and achieve the effects of low cost, high safety factor and convenient operation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0050] Below in conjunction with accompanying drawing and embodiment the present invention will be further described:
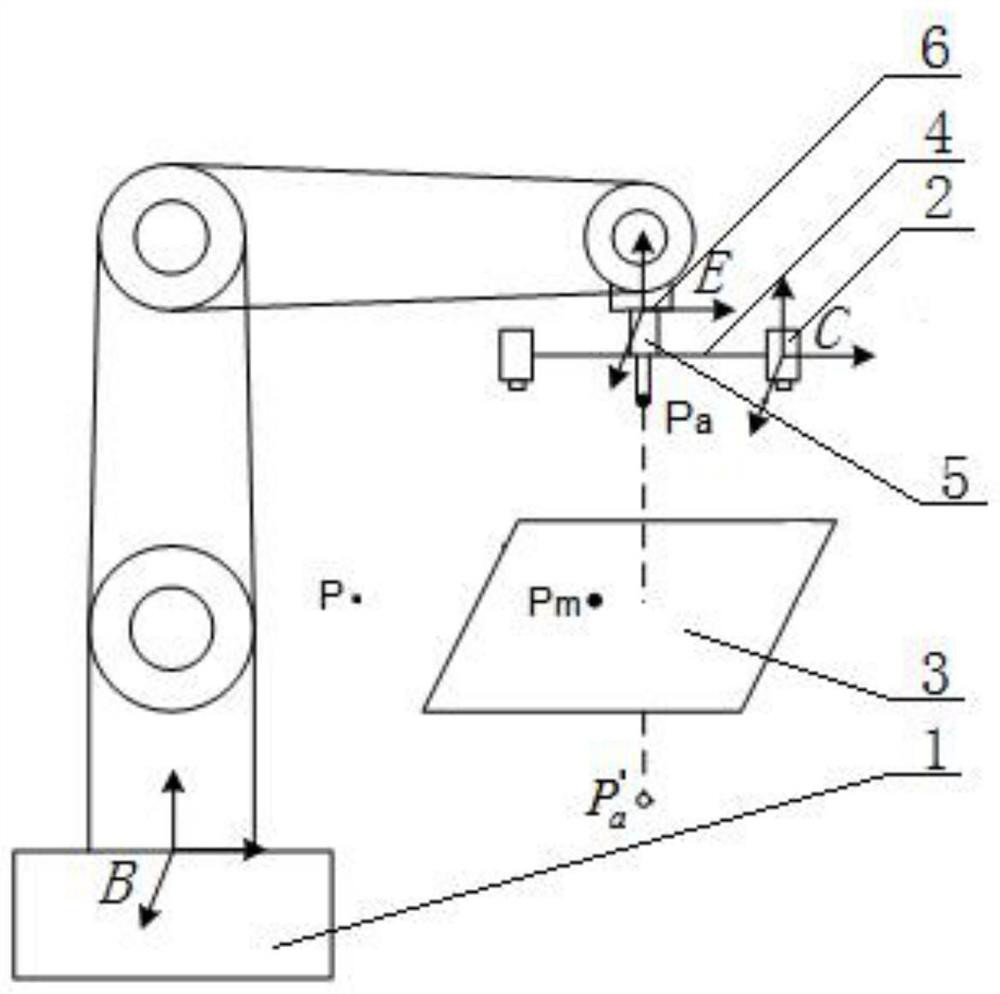
[0051] Such as figure 1 As shown, the embodiment of the present invention discloses a robot TCP calibration method based on vertical reflection, comprising the following steps:
[0052] (S1) Establish the binocular vision system coordinate system {C} on the binocular vision system; establish the robot end coordinate system {E} at the robot end 6, and determine the binocular vision system coordinate system {C} relative to the robot end coordinate system { The transformation matrix of E} For robot hand-eye relationship.
[0053] In this embodiment, in step (S1), the specific steps are:
[0054] (S101) establish the robot hand-eye relationship as Among them, R C It is the rotation matrix converted from the end coordinate system {E} of the robot and the coordinate system {C} of the binocular vision system and is a fixed value; T C is the translation vect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More