A system calibration method for a three-dimensional line-of-sight tracking system
A technology of eye tracking and system calibration, applied in the field of computer vision, can solve the problem that the light source and the screen are not within the field of view of the system camera, and achieve the effect of good calibration requirements, convenient operation and high calibration accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] In order to make the objects, technical solutions, and advantages of the present invention, the embodiments of the present invention will be further described in detail below with reference to the accompanying drawings.
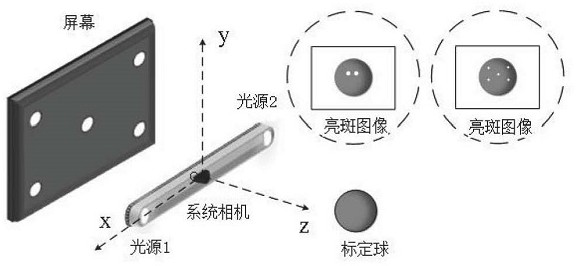
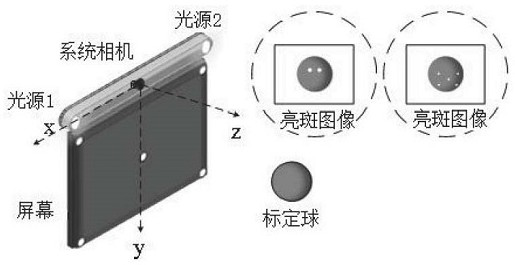
[0082] Embodiments of the present invention provide a system calibration method for a three-dimensional view line tracking system, such as figure 1 As shown, the method includes the following steps:
[0083] Calibrate the system camera to obtain internal parameters of the system camera, including focal length, like the main point, like the original size, distortion parameters, etc.
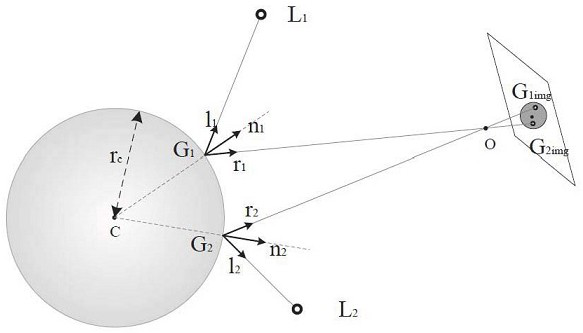
[0084] Place the calibration ball in the field of view of the system camera, shoot the shot image formed on the reflection on the ball and calibration ball;
[0085] Change the position of the laminated ball, shoot the calibration ball and shot image of multiple groups;
[0086] According to the spherical heart and shot coordinates of different positions, construct a plurality...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More