Intelligent obstacle avoidance system and method of autonomous vehicle
An automatic driving and intelligent obstacle avoidance technology, applied in the direction of control devices, etc., can solve the problems of inability to achieve autonomous obstacle avoidance and low transportation efficiency, and achieve the effect of reducing the probability of collision and increasing the efficiency of traffic.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
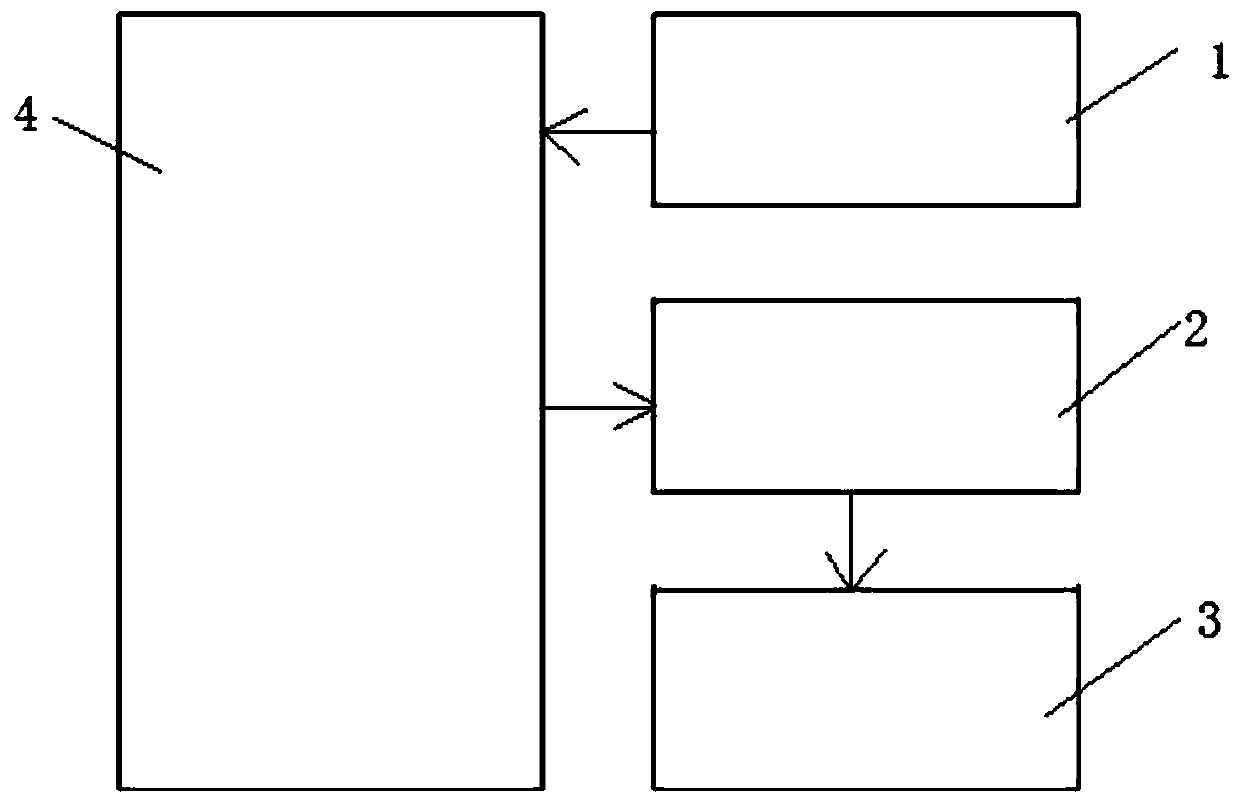
[0032] An intelligent obstacle avoidance system for an automatic driving vehicle in this embodiment, such as figure 1 As shown, its composition includes: an obstacle detection device 1 installed on an automatic driving vehicle, an obstacle trajectory prediction subsystem 2, a vehicle decision-making subsystem 3, and a data set acquisition device 4;
[0033] The obstacle detection device 1 is used to detect other self-driving vehicles, use the detected self-driving vehicles as obstacles, and process the detected data to obtain the coordinates of the obstacle vehicle relative to the sensor;
[0034] The data set acquisition device 4 is used to collect the information of the vehicle trajectory of the obstacle, and record and store the trajectory of the vehicle running in the dock scene; the collected vehicle trajectory is used as the training set of the trajectory prediction algorithm, and the training is performed several times. Save the trained obstacle trajectory prediction a...
specific Embodiment approach 2
[0038] An intelligent obstacle avoidance system for an automatic driving vehicle in this embodiment, the obstacle detection device 1 is realized by a visual sensor and a laser radar sensor;
[0039] The visual sensor detects the vehicle through a target detection method,
[0040] The specific position of the obstacle is detected by the lidar sensor;
[0041] Using the result of the fusion of the lidar sensor and the vision sensor, whether the obstacle is a vehicle is obtained, and the relative position coordinates of the obstacle vehicle relative to the sensor are obtained.
specific Embodiment approach 3
[0043] An intelligent obstacle avoidance system for self-driving vehicles in this embodiment, the data collection device 4 is realized by laser sensors and visual sensors, and the laser sensors and visual sensors are installed on ordinary vehicles, and the driver drives the ordinary vehicles Collect the driving information of other vehicles in the dock environment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com