

Control method and device for virtual excavators
A control method and control device technology, applied in the field of virtual simulation, can solve the problems of no training value of equipment, lack of sense of experience, long training period, etc., and achieve the effect of enhancing the sensory experience of motion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
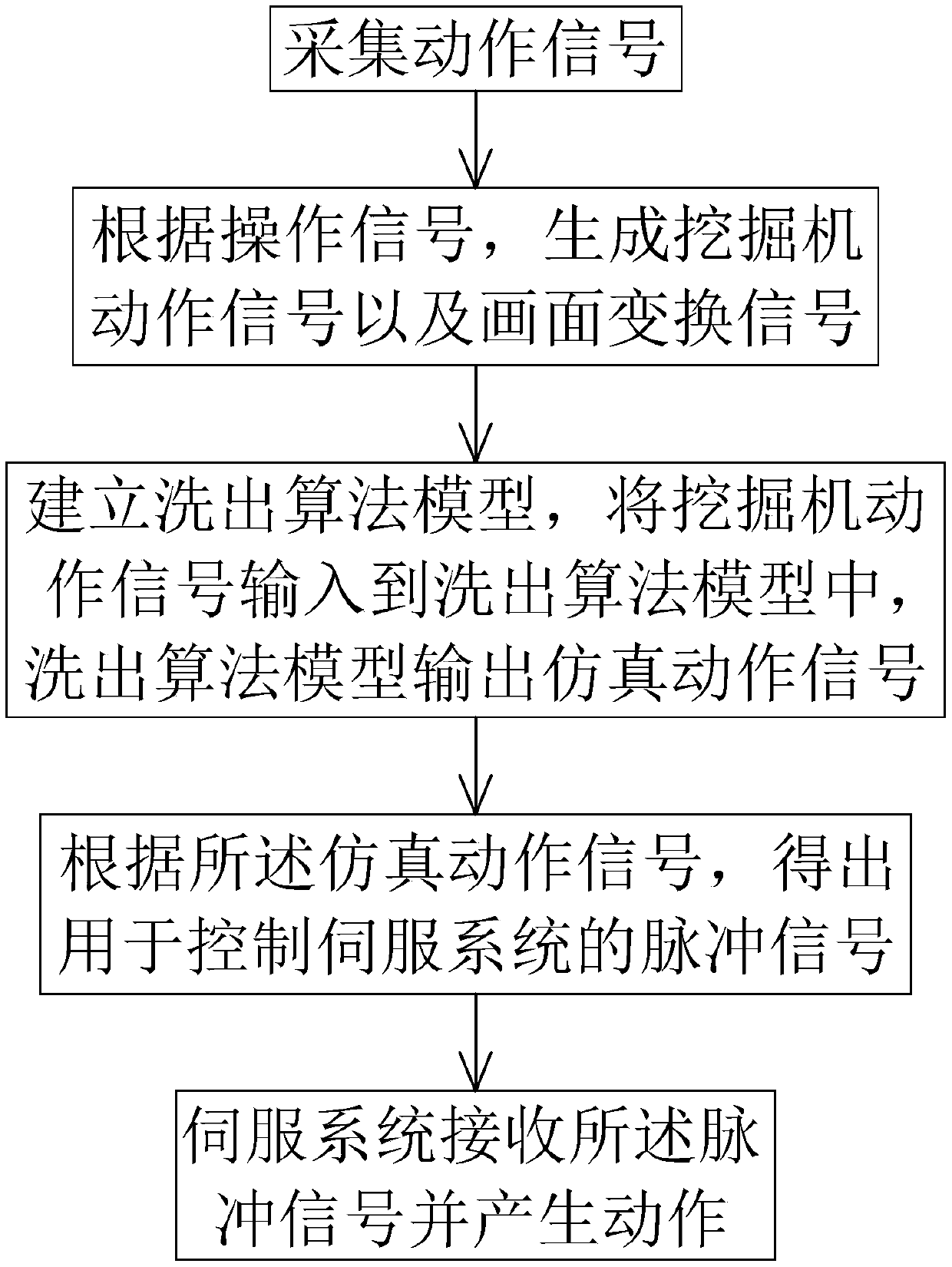
[0056] refer to figure 1 , the present application discloses a method for controlling a virtual excavator, the first embodiment of which includes the following steps:
[0057] Step 100, collecting operation signals;
[0058] Step 200, generating an excavator action signal and a picture change signal according to the operation signal;
[0059] Step 300, establishing a washout algorithm model, inputting the excavator action signal into the washout algorithm model, and the washout algorithm model outputs a simulation action signal;
[0060] Step 400, obtain a pulse signal for controlling the servo system according to the simulated action signal;
[0061] Step 500, the servo system receives the pulse signal and generates an action;
[0062] In the step 200, according to the operation signal, the excavator action signal obtained includes a traveling acceleration signal and a rotational angular velocity signal. In step 300, the traveling acceleration signal and the rotational ang...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More