

Sucker clamp and control method thereof
A control method and suction cup technology, which is applied in the field of construction, can solve the problems of insufficient precision of floor tile paving and other problems, and achieve the effect of solving the problem of insufficient paving precision and good paving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
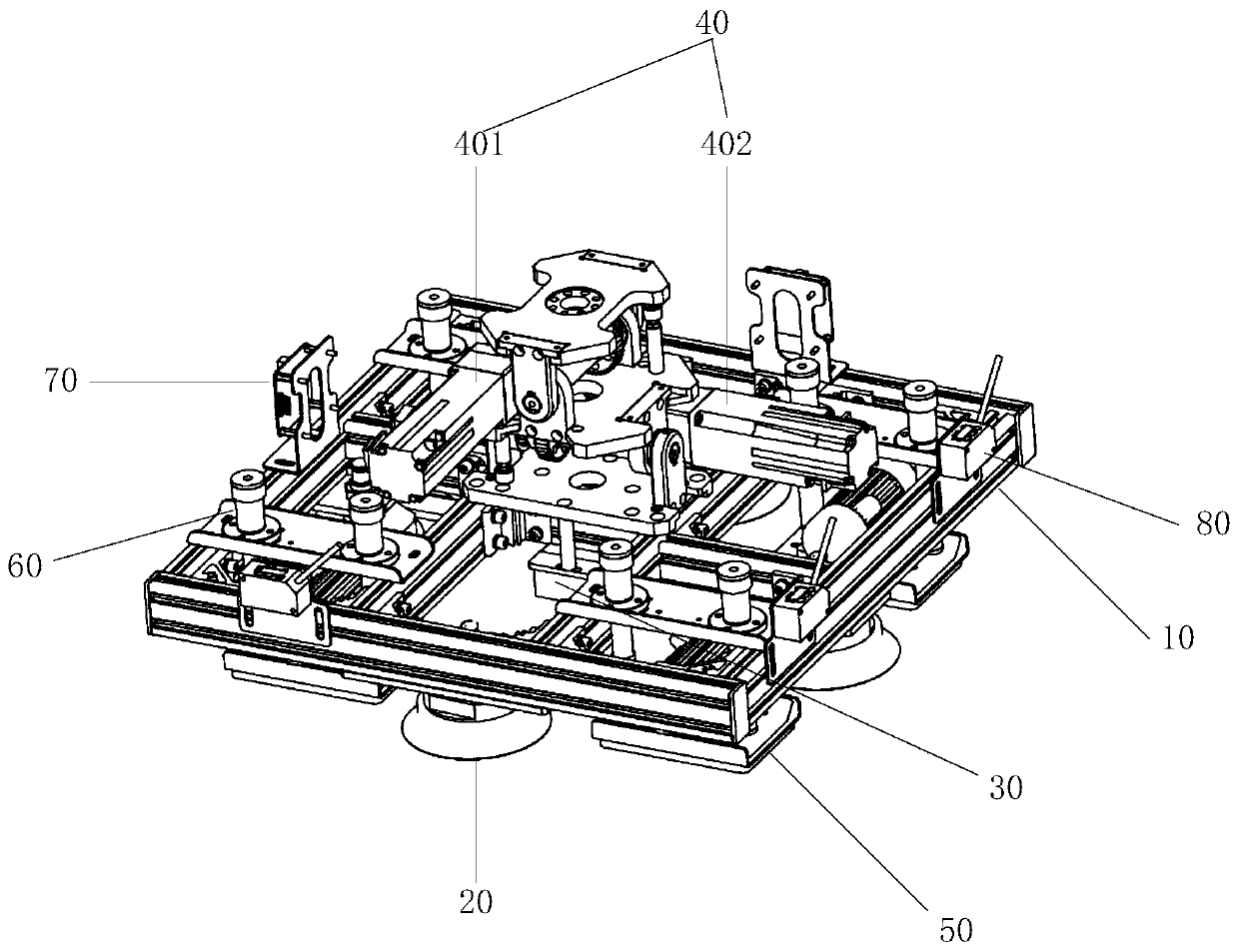
[0026] According to an embodiment of the present invention, a suction cup fixture is provided, and the suction cup fixture can be set on a robot for laying floor tiles or other handling equipment for grabbing and placing a target object. In the following embodiments, the target The object is floor tiles for illustration, figure 1 It is a schematic diagram of a suction cup clamp according to an embodiment of the present application, combined with figure 1 As shown, the suction cup fixture includes:
[0027] The suction cup 20 is arranged under the suction cup fixture main body 10 and is used for grabbing the target object.
[0028] Specifically, the above-mentioned target object is a floor tile to be transported, and the above-mentioned suction cup 20 is used to grab the floor tile by means of adsorption, and the suction cup may be a circular disc-shaped structure with a depression in the middle.
[0029] In an optional embodiment, the above-mentioned suction cup 20 may be de...
Embodiment 2
[0050] According to an embodiment of the present invention, an embodiment of a method for controlling a suction cup clamp is provided. It should be noted that the steps shown in the flow chart of the accompanying drawings can be executed in a computer system such as a set of computer-executable instructions, and , although a logical order is shown in the flowcharts, in some cases the steps shown or described may be performed in an order different from that shown or described herein.
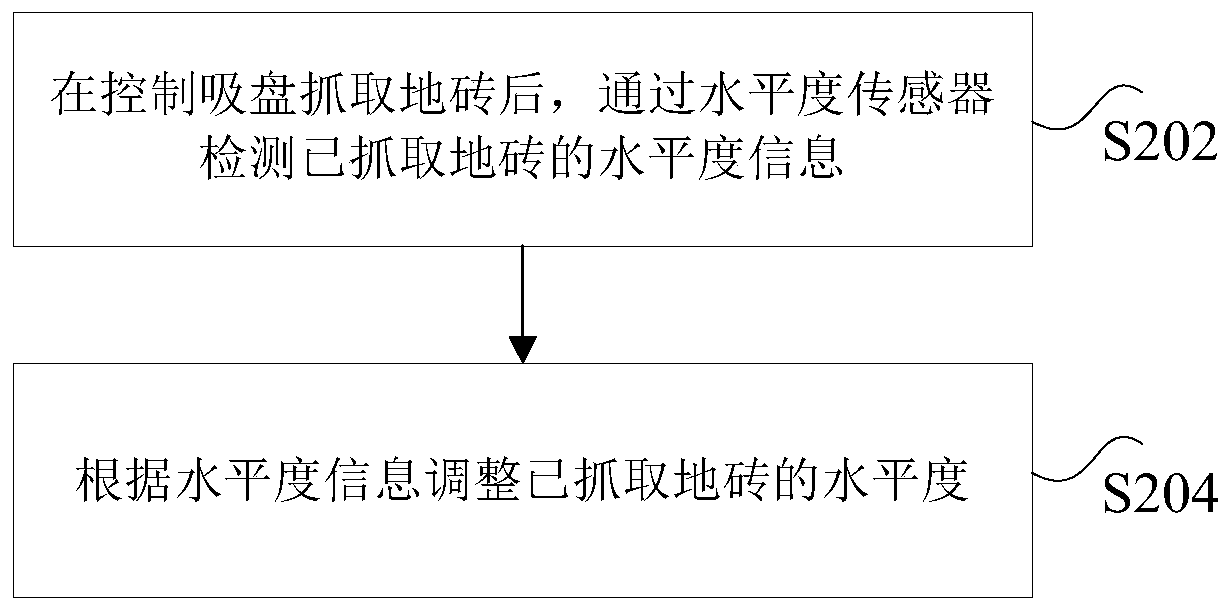
[0051] figure 2 It is a flowchart of a control method of a suction cup clamp according to an embodiment of the present application, the suction cup clamp includes any one of the suction cup clamps in Embodiment 1, such as figure 2 As shown, the method includes the following steps:
[0052] Step S202 , after the suction cup 20 is controlled to grab the target object, the levelness sensor 30 is used to detect the levelness information of the grasped target object.
[0053] Specifically, the abo...
Embodiment 3
[0067] According to an embodiment of the present invention, a storage medium is provided, and the storage medium includes a stored program, wherein when the program is running, the device where the storage medium is located is controlled to execute the method for controlling the suction cup fixture described in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More