

Vehicle Target Detection and Tracking Method Based on Dynamic Correlation Model in Remote Sensing Video
A dynamic correlation and target detection technology, applied in the field of image processing, can solve the problems of difficulty in obtaining the target position of the first frame, reduced tracking accuracy, and inability to detect, so as to reduce the number of falsely detected targets, flexibly initialize and destroy, and improve tracking accuracy. rate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
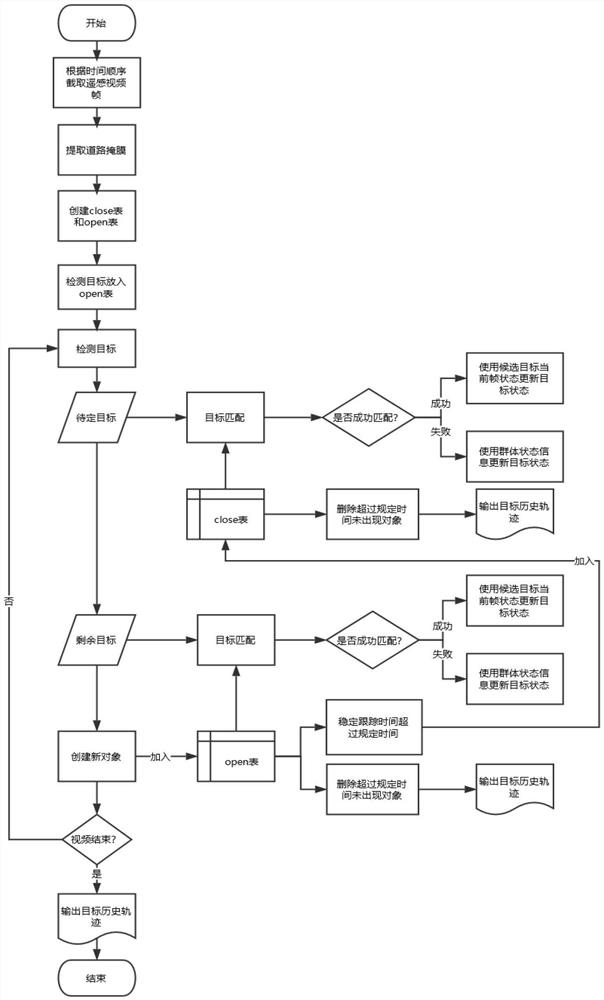
[0033]Existing methods usually perform moving target detection and tracking work separately. For tracking, the exact position of the tracking target is given in the first frame, and no new targets will be detected and added later. The Kalman filter method is used to predict the target position during the tracking process. , use the similarity measure to correlate objects between frames, and only consider the object to disappear when it leaves the boundary. In tracking, the Kalman filter method is often used to predict the motion state of the target. However, in the remote sensing video moving vehicle target tracking task, there are often situations such as deceleration at intersections and overpass occlusion. track effect. Ideally, the remote sensing moving vehicle target detection will give the specific position of the tracking vehicle in the first frame, but in practical applications, it is expensive to accurately calibrate each moving vehicle target. The commonly used meth...
Embodiment 2
[0051] The remote sensing video vehicle target detection and tracking method based on the dynamic association model is the same as embodiment 1, and the moving target detection step in step (2.1) is as follows:
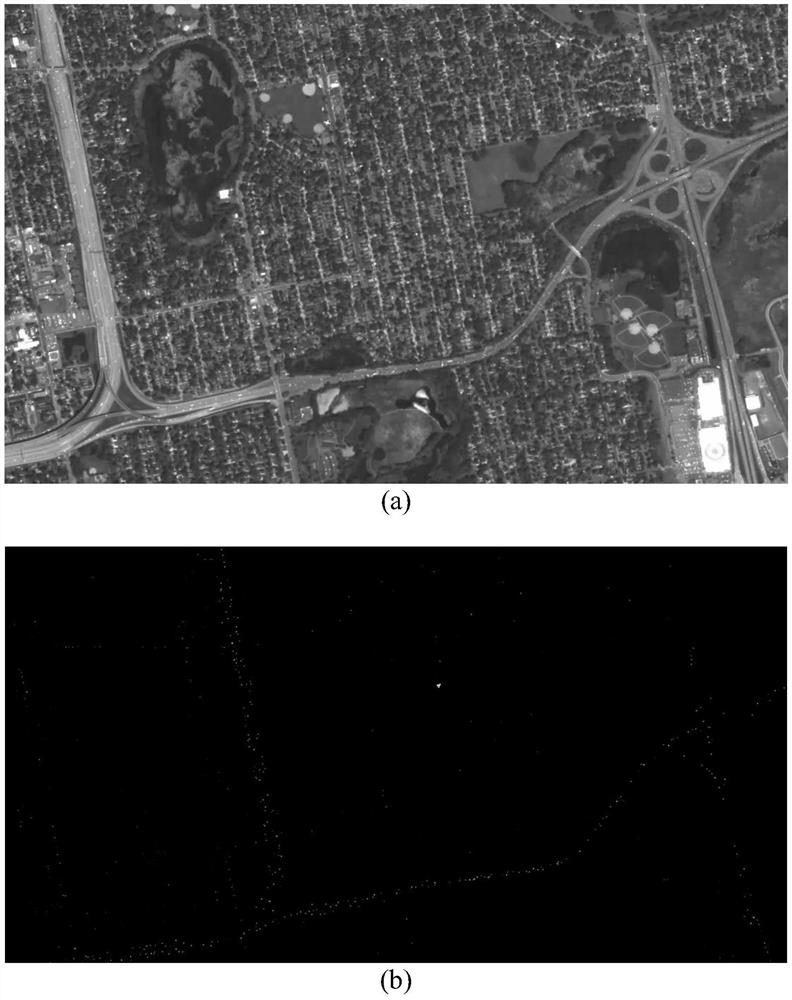
[0052] (2a) Build a background model, use the background subtraction method to obtain a difference map, and filter the moving target area according to the area.
[0053] More specific operations are described as follows:
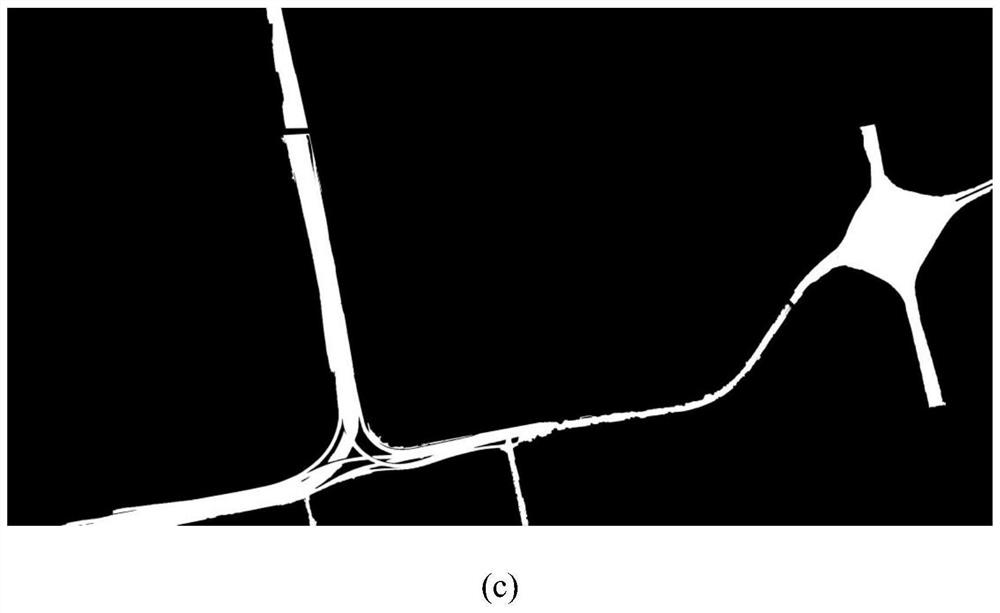
[0054] (2a.1) For the background model, use the road extraction or manual segmentation method to obtain the road mask; build the background model. Instead of calculating the mean value of all frames in the continuous video, a preliminary screening is performed first, and the pixel value of the current position "still" frame in the video is selected as the background pixel value of the current position. The specific operation is as follows: if the deviation between the pixel value at the position of the current frame (x, y) and the pixel value at th...
Embodiment 3
[0060] The remote sensing video vehicle target detection and tracking method based on the dynamic association model are the same as embodiment 1-2, using the trajectory optimization method described in step (3.4), the specific steps are as follows:
[0061] Trajectory optimization refers to ensuring a stable change in direction between each frame, making the entire trajectory relatively smooth. According to common sense, it is believed that the vehicle is not allowed to turn at a large angle suddenly and go backwards during driving, so the change of the driving angle of the vehicle should not exceed the direction threshold, that is,
[0062]
[0063]
[0064] |θ t-1 -θ t |≤θ threshold
[0065] The specific steps of the trajectory optimization method are as follows:
[0066] (3.4a) Calculate the historical movement direction of the vehicle target
[0067] (3.4b) Calculate the new movement direction of the vehicle target after adding the candidate target
[0068]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More