Full-coverage path planning method of cleaning robot
A cleaning robot and path planning technology, applied in the direction of instruments, two-dimensional position/channel control, vehicle position/route/height control, etc., can solve the problems of inability to complete the full-coverage cleaning work and the inability to move forward in dead zones, achieving less Energy saving, power saving, and the effect of reducing the cost of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
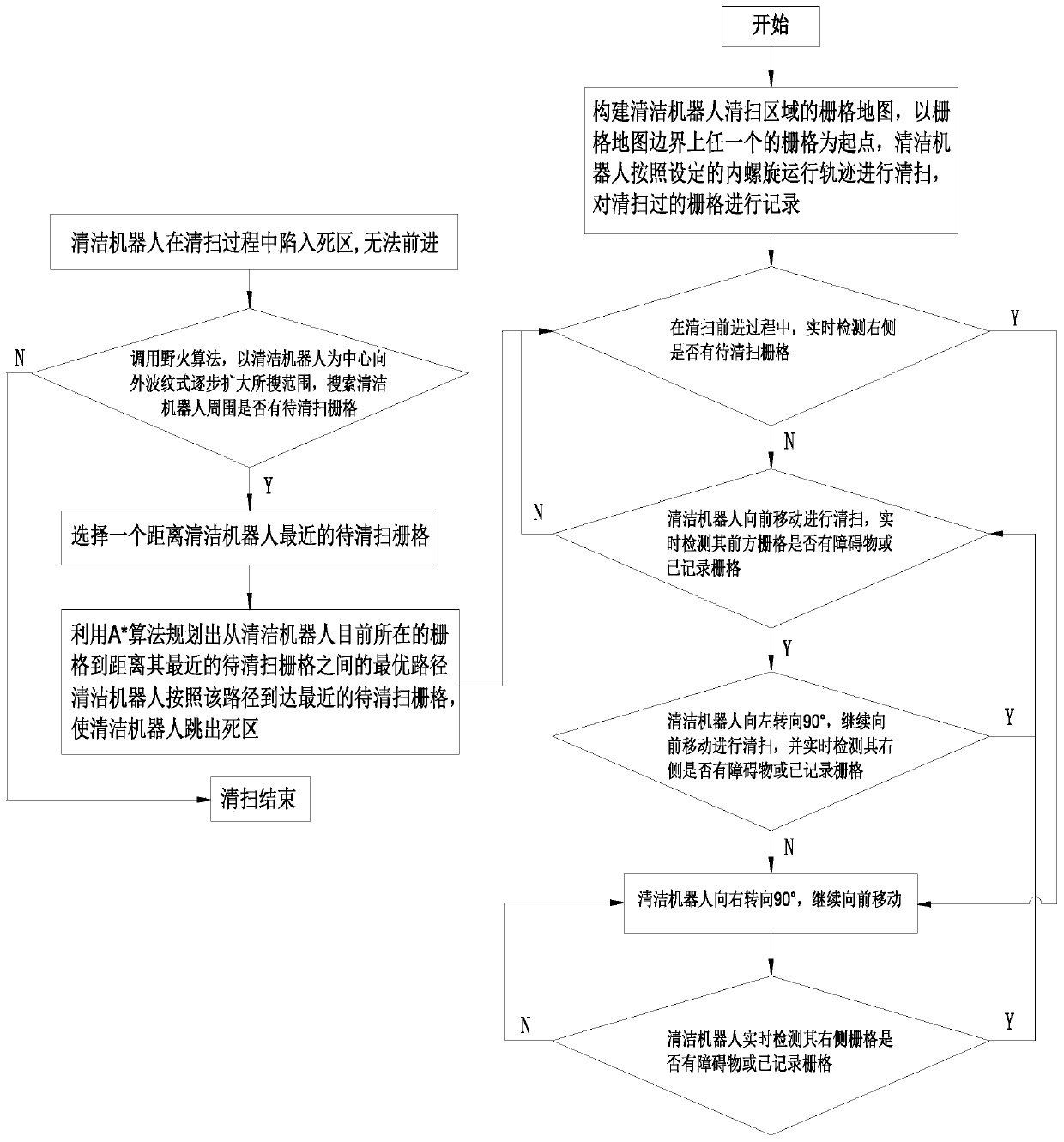
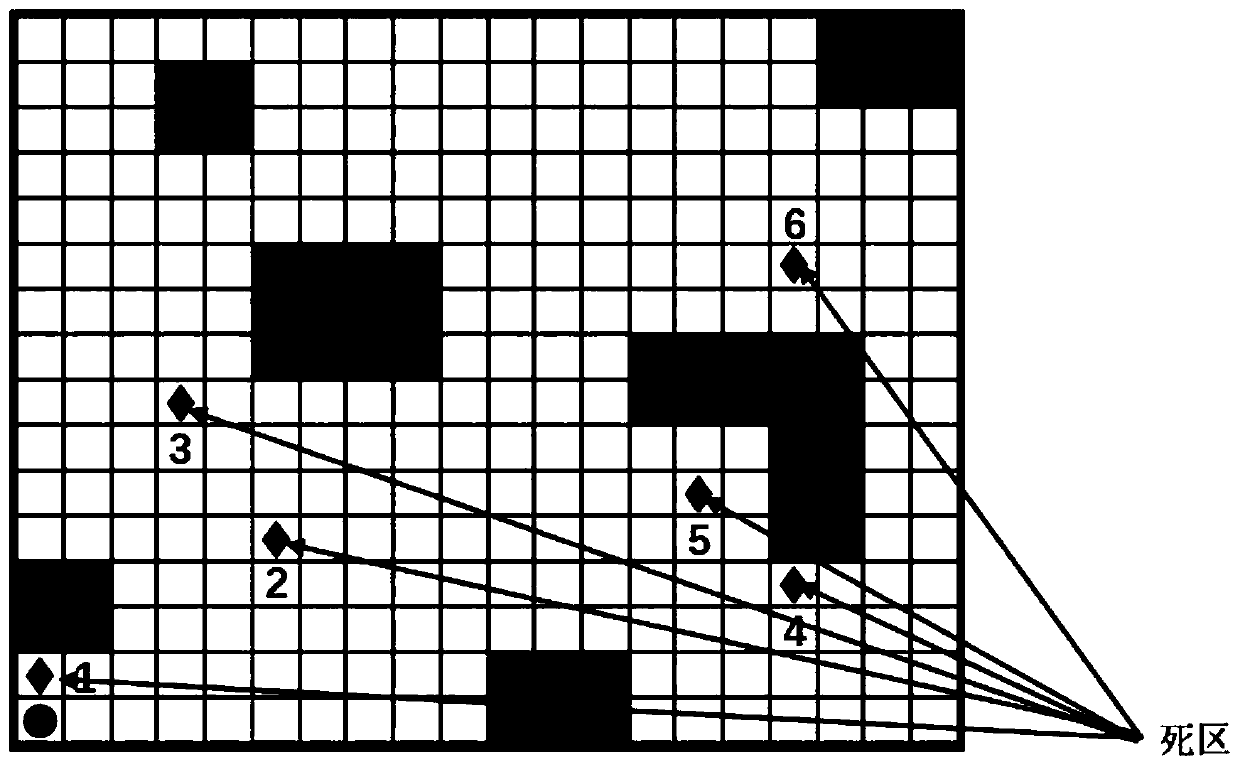
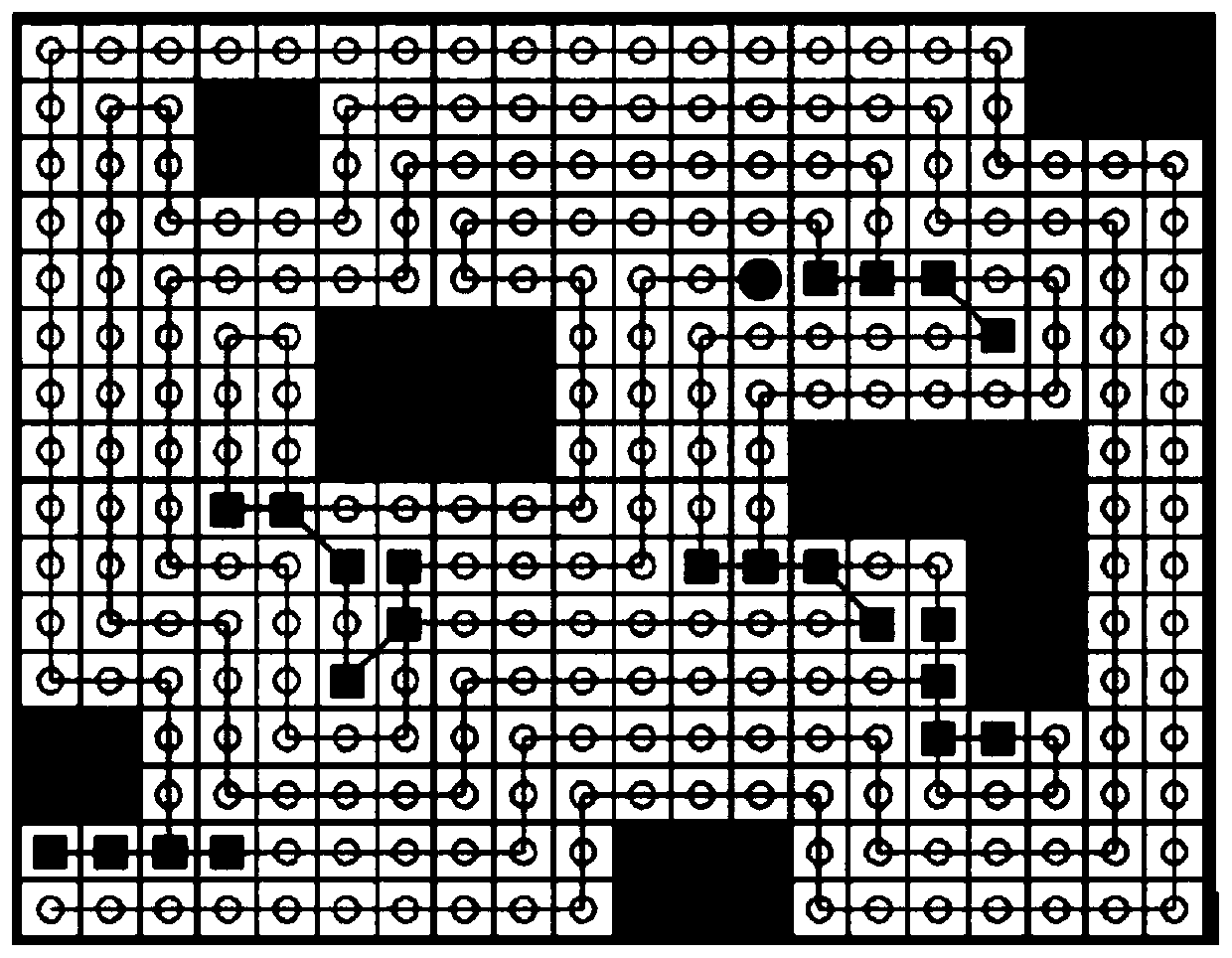
[0034] Example: The cleaner cleans counterclockwise according to the set inner spiral running track, such as figure 2 As shown in , the cleaning robot needs to complete full-coverage cleaning from the lower left corner of the grid map, which is the black disc, as shown in image 3 As shown, the completed working environment map, the circle connection in the figure indicates the cleaning path of the cleaning robot, and the small black square indicates the path of the cleaning robot jumping out of the dead zone after falling into the dead zone, as shown in figure 1 As shown, the specific path planning method is as follows:
[0035] S1 Construct a grid map of the cleaning area of the cleaning robot. Starting from any grid on the grid map boundary, the cleaning robot cleans counterclockwise according to the set inner spiral trajectory, and records the cleaned grids. It is recorded that the grid cleaning robot no longer performs repeated cleaning; the grid map construction meth...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com