

Method for planning path of unmanned aerial vehicle under multiple dynamic task target points
A dynamic task and path planning technology, applied in biological neural network models, data processing applications, navigation computing tools, etc., can solve problems such as no description or report found, no data collected, etc., to achieve the effect of ensuring superiority
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The following is a detailed description of the embodiments of the present invention: this embodiment is implemented on the premise of the technical solution of the present invention, and provides detailed implementation methods and specific operation processes. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention, and these all belong to the protection scope of the present invention.
[0053] An embodiment of the present invention provides a UAV path planning method under multiple dynamic task target points, and the method is implemented for the following UAV path planning problems and based on the following principles.
[0054] The UAV path planning problem under multiple dynamic mission target points can be described as:
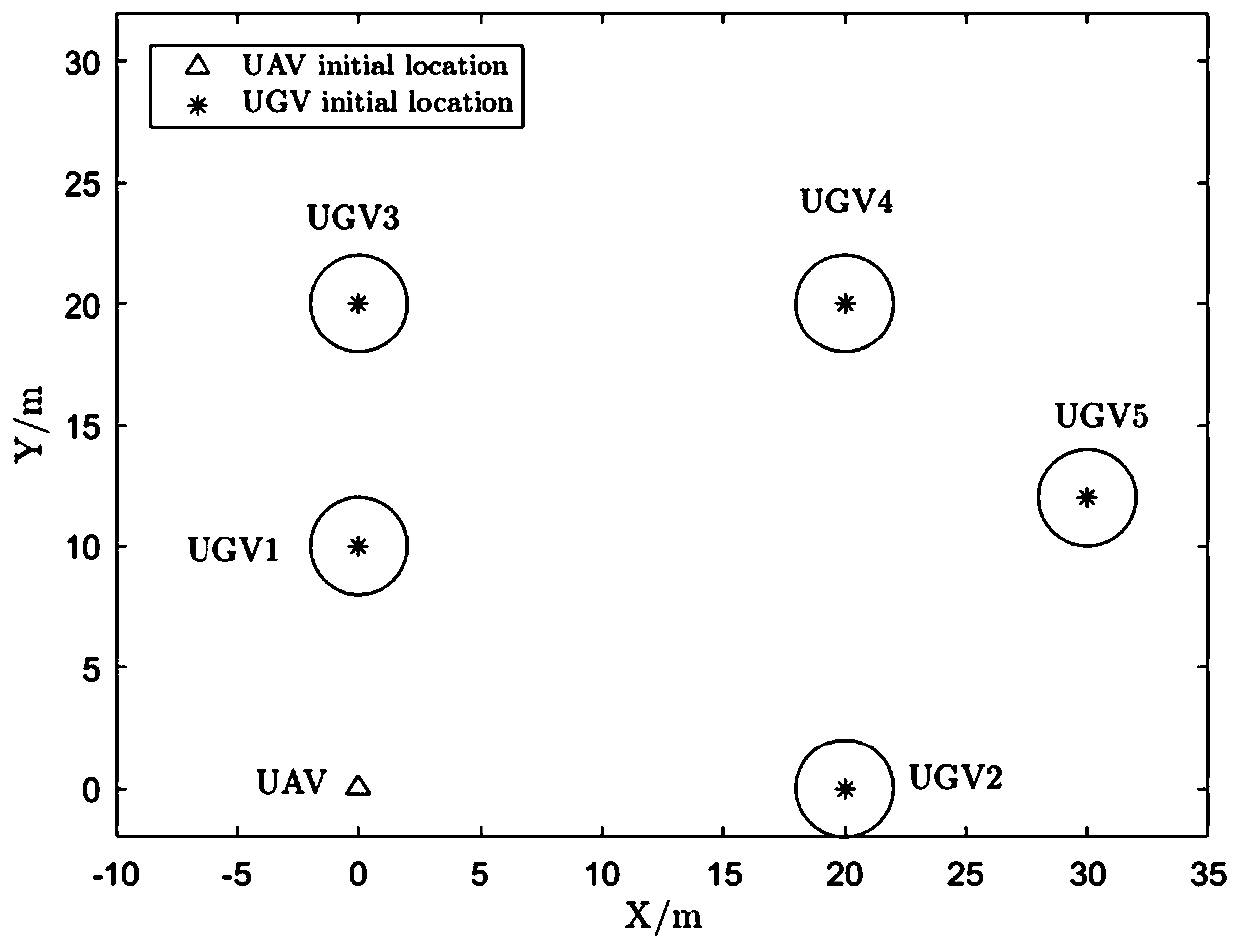
[0055] Taking forest fire fighting as an example, there are multiple fire points in the known space, and a cooperative system composed of n unman...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More