

Method for dynamically adjusting navigation path of unmanned aerial vehicle in real time
A navigation path, real-time dynamic technology, applied in the field of UAV navigation, can solve the problems such as the lack of general aviation traffic control standards and plans, the limitation of the market application scale of UAV technology, and the limited application area, so as to improve the real-time performance and accuracy, strong path optimization, and the effect of optimizing the flight path
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
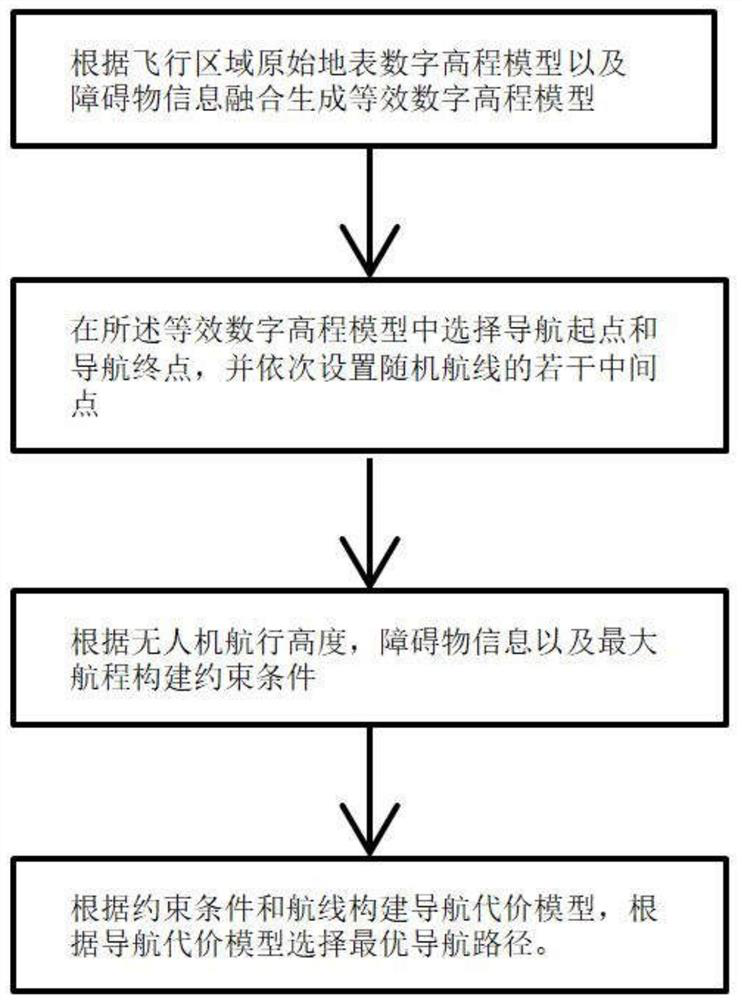
[0028] The UAV real-time dynamic adjustment navigation path method includes: S1, according to the original surface digital elevation model of the flight area and the fusion of obstacle information to generate an equivalent digital elevation model;
[0029] S2, selecting a navigation starting point and a navigation end point in the equivalent digital elevation model, and sequentially setting several intermediate points of random routes;
[0030] S3, constructing constraint conditions according to the flight height of the drone, the obstacle information and the maximum range;
[0031] S4. Construct a navigation cost model according to constraints and routes, and select an optimal navigation path according to the navigation cost model.
[0032] Further, the constraints also include horizontal rotation angle, pitch angle, the minimum step size of the route, and the safe distance of the waypoint.
[0033] Further, before step S1, the UAV receives the no-fly zone and extreme weathe...
Embodiment 2
[0044] The method of real-time dynamic adjustment of the navigation path of the UAV includes:
[0045] S0, the UAV receives the no-fly zone and extreme weather information sent by the server in real time,
[0046] S1, generate an equivalent digital elevation model based on the fusion of the original surface digital elevation model and obstacle information in the flight area;
[0047] S11, periodically merging the navigation no-fly zone and extreme weather information sent by the UAV real-time receiving server into the equivalent digital elevation model to generate an optimized equivalent digital elevation model;
[0048] S2, selecting a navigation start point and a navigation end point in the equivalent digital elevation model;
[0049] S3, constructing constraint conditions according to the flight height of the drone, the obstacle information and the maximum range;
[0050] S4, constructing a navigation cost model according to the constraints and routes, and selecting the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More