

Unmanned aerial vehicle inspection path planning method based on discrete point density and global planning
A technology of inspection path and global planning, applied in mechanical equipment, combustion engines, internal combustion piston engines, etc., can solve the problems of many inspection points, long intervals of inspection points, and difficulty in completing inspection tasks, reducing the number of inspection points. Energy consumption, low cost, finely measured effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
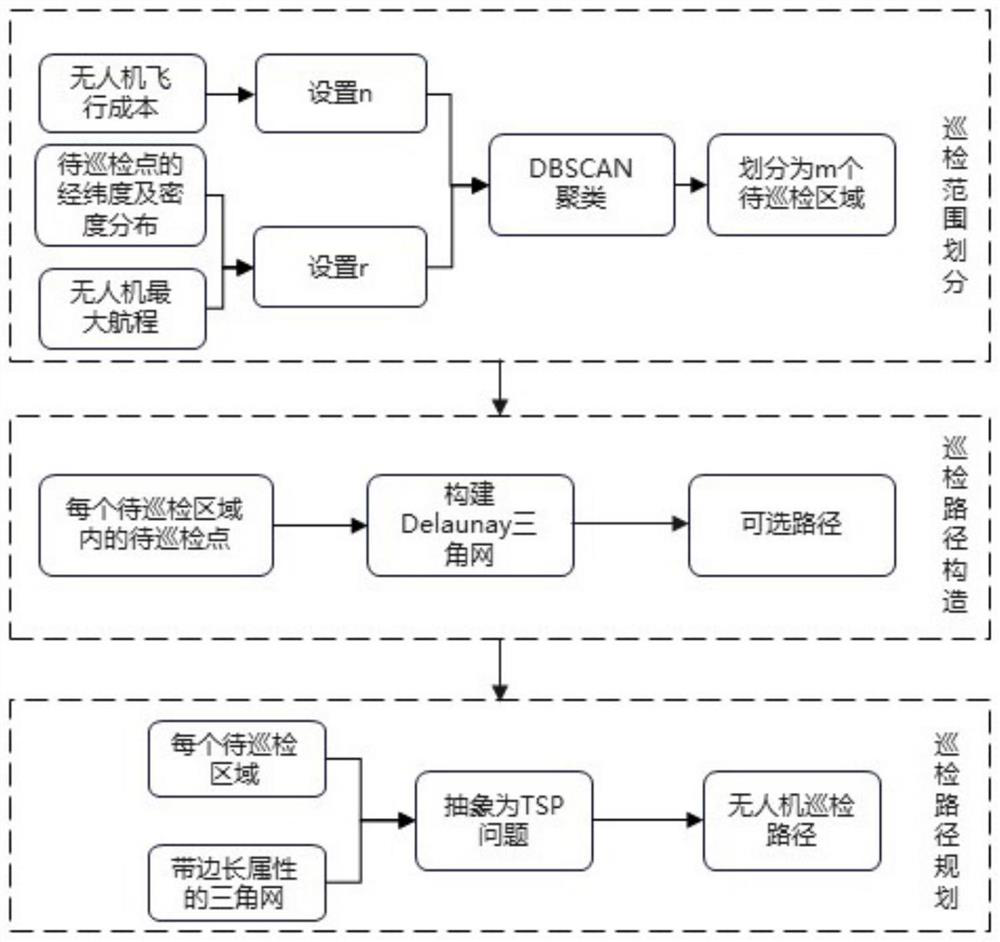
[0020] The specific process of this embodiment includes three steps:
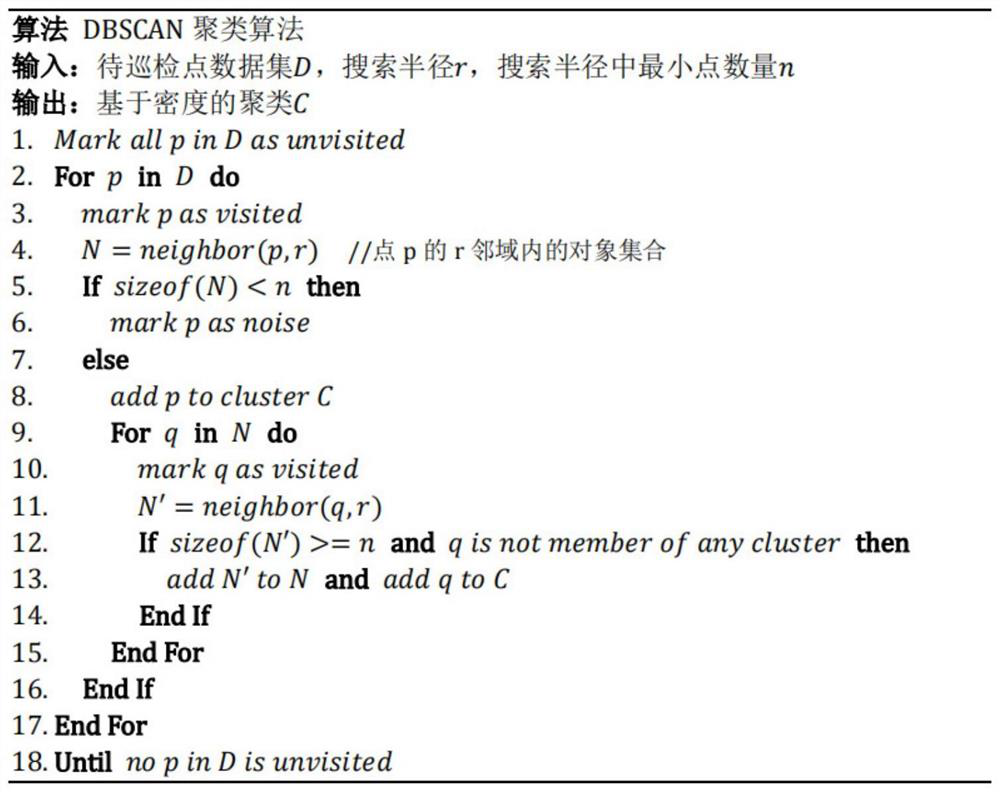
Step 1: Refer to Figure 5 , there are 19 points to be inspected in the entire area to be inspected, and the longitude and latitude of each point to be inspected are obtained respectively. In order to meet the cost of a single flight of the UAV, set n to 3; comprehensively consider the shortest distance between the points to be inspected and the maximum range of the UAV, observe the spatial position and density relationship of the inspection points, and the radius is 2 kilometers. There are 3 or more points to be inspected in the range, which is more in line with the density distribution of the points to be inspected, so set the search radius r to 2 kilometers. see figure 2 , using the DBSCAN algorithm to cluster the inspection points, the algorithm will visit a point arbitrarily, and find all points with a distance of less than or equal to 2 kilometers from the point, if the number of points in its neigh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More