

Wheel hub motor vehicle failure control method and vehicle control unit
A hub motor and failure control technology, applied in electric vehicles, control drives, vehicle components, etc., can solve problems such as the inability to guarantee vehicle driving safety, and achieve the effect of improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
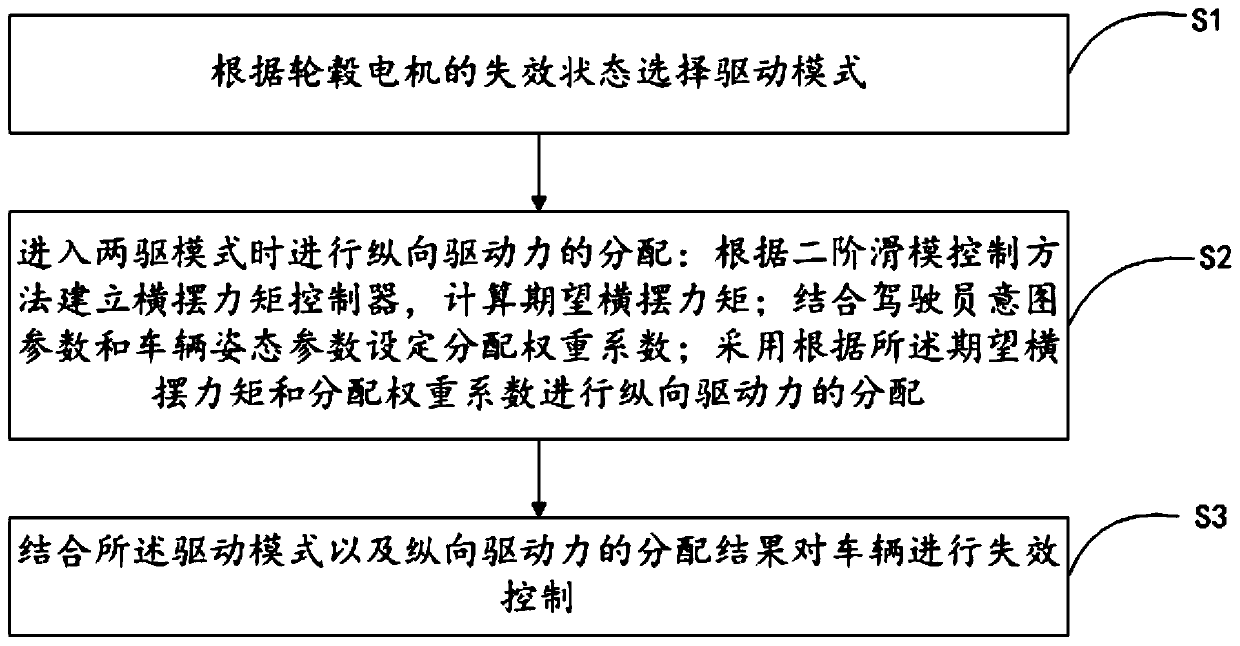
[0027] Such as figure 1 As shown, embodiment 1 of the present invention provides the in-wheel motor vehicle failure control method, hereinafter referred to as the control method, comprising the following steps:
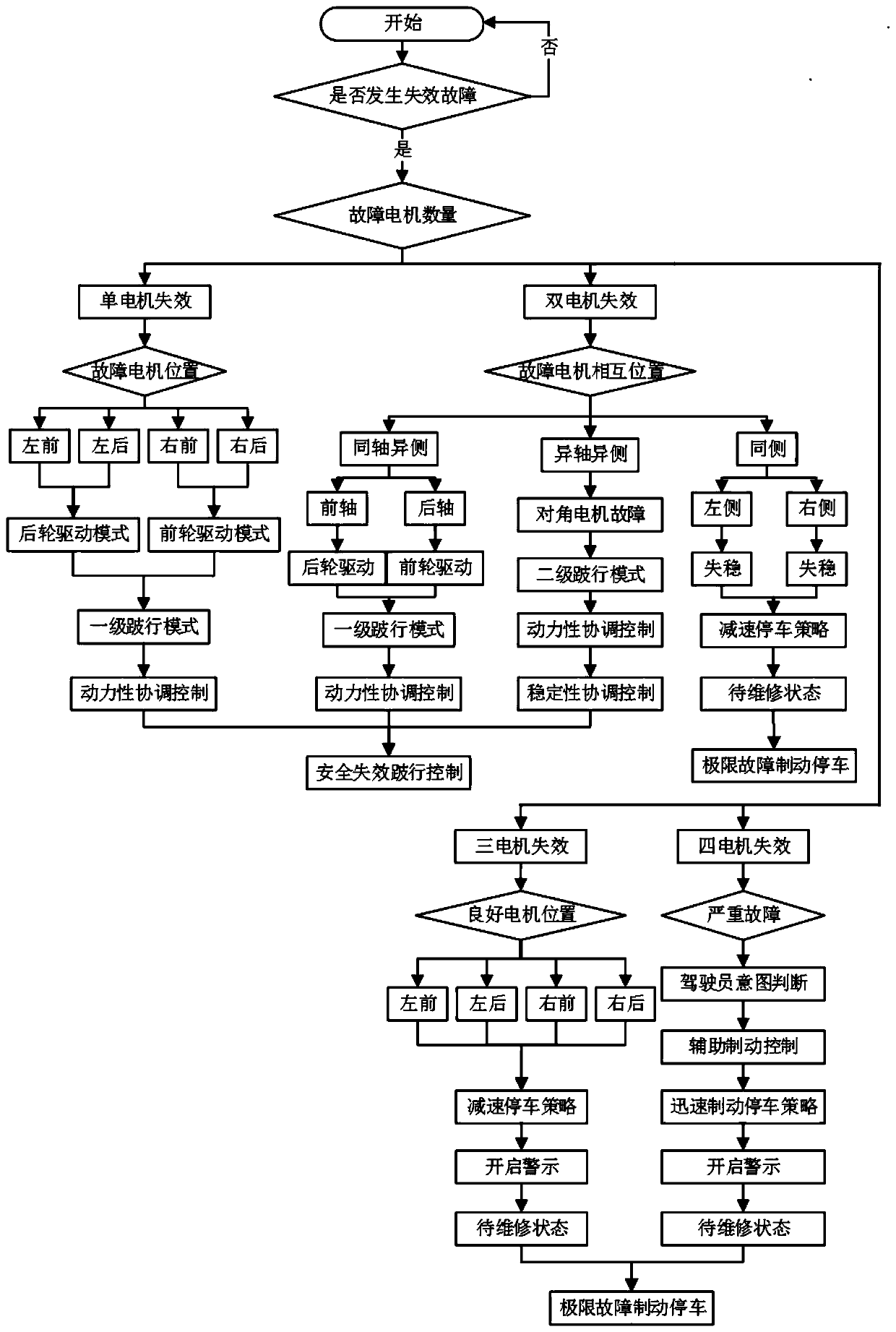
[0028] S1. Select the driving mode according to the failure state of the hub motor;
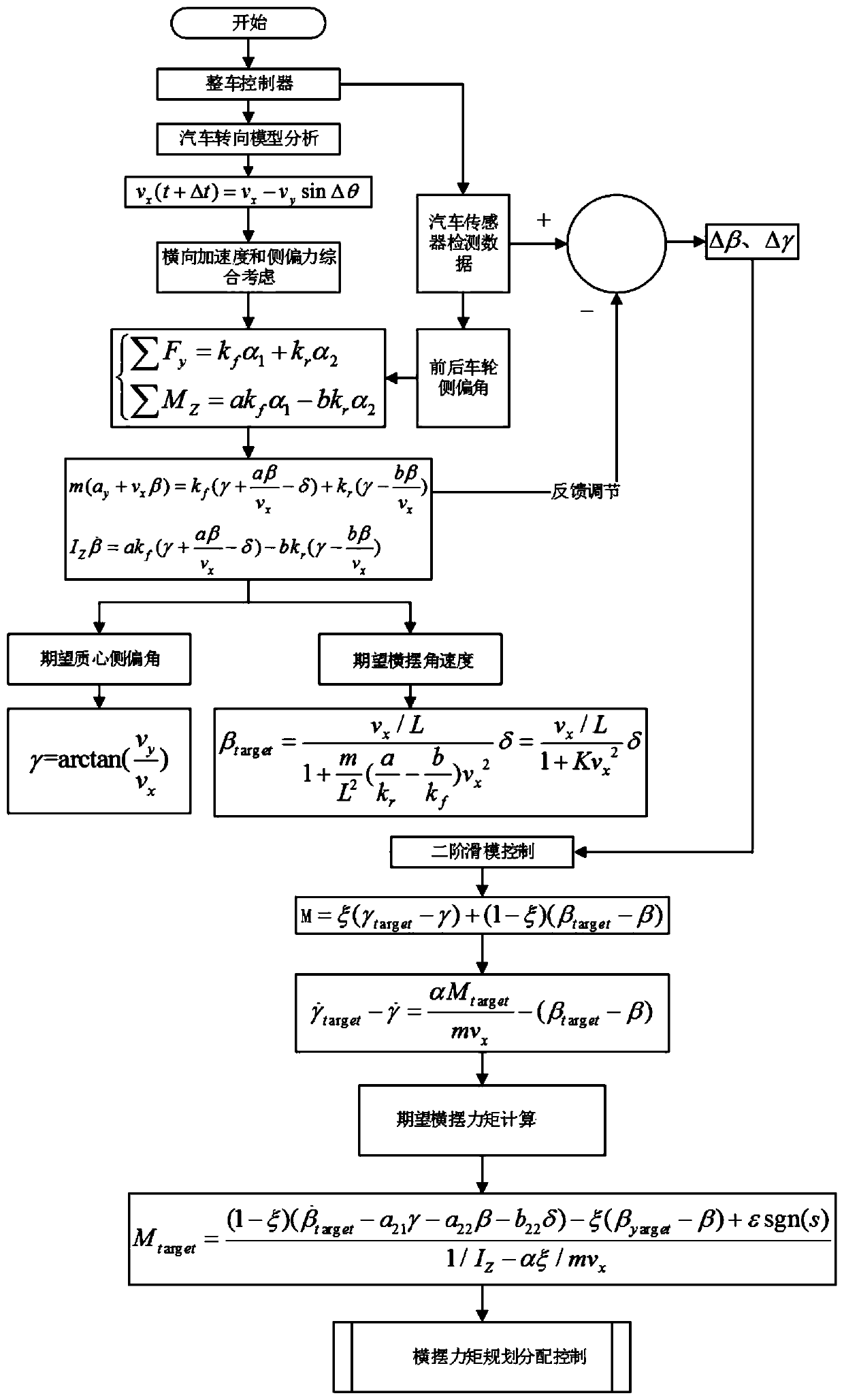
[0029] S2. When entering the two-wheel drive mode, distribute the longitudinal driving force: establish a yaw moment controller according to the second-order sliding mode control method, and calculate the expected yaw moment; combine the driver's intention parameters and vehicle attitude parameters to set the distribution weight coefficient; according to The desired yaw moment and the distribution weight coefficient are used to distribute the longitudinal driving force;
[0030] S3. Perform failure control on the vehicle in combination with the driving mode and the distribution result of the longitudinal driving force.
[0031] During the driving process of the distributed drive ve...
Embodiment 2
[0142] Embodiment 2 of the present invention provides a vehicle controller, including a processor and a memory, and a computer program is stored in the memory. When the computer program is executed by the processor, the in-wheel motor provided by any of the above embodiments is realized. Vehicle failure control methods.
[0143] The in-wheel motor vehicle failure control method is specifically: select the driving mode according to the failure state of the in-wheel motor;
[0144] When entering the two-wheel drive mode, distribute the longitudinal driving force: establish a yaw moment controller according to the second-order sliding mode control method, and calculate the expected yaw moment; combine the driver's intention parameters and vehicle attitude parameters to set the distribution weight coefficient; according to the The desired yaw moment and distribution weight coefficient are used to distribute the longitudinal driving force;
[0145] Combined with the driving mode a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More