

Path planning method based on improved A* algorithm
A path planning and path technology, applied in the field of intelligent robots, can solve the problems of consumption of memory resources, low efficiency, etc., and achieve the effect of coherent motion form, smooth overall path, and reduction of total length.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
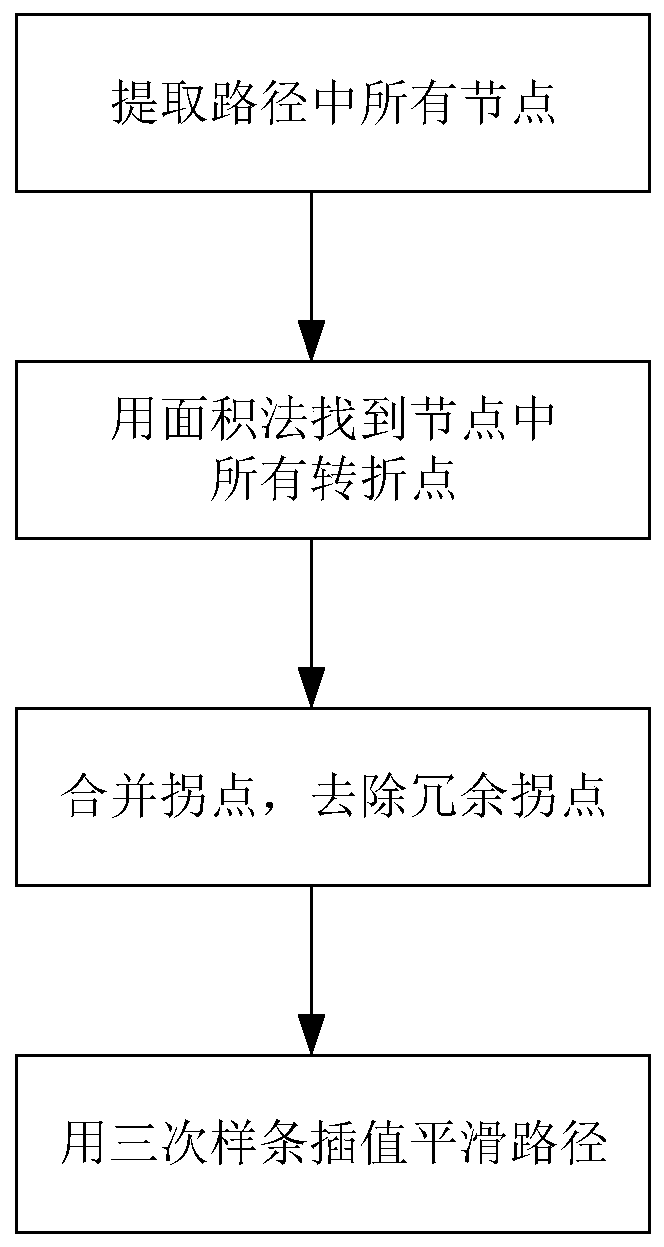
[0059] A kind of path planning method based on the improved A* algorithm described in the present invention, the overall process is as follows figure 1 shown, including the following steps:
[0060] Step 1: Express the robot's environment as a grid map, and use the A* algorithm to search for an initial path from the starting point to the target point in the grid map.
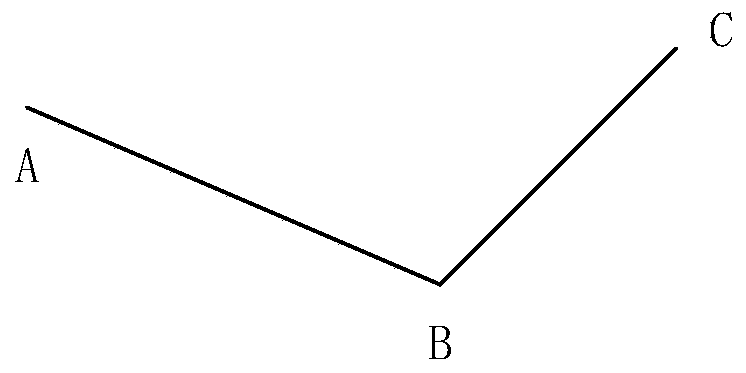
[0061] Step 2: Extract all the nodes in the initial path, start from the starting point, use the area method to judge whether the three adjacent nodes are collinear in turn, so as to find all the turning points on the path, that is, the inflection points; the details are as follows:
[0062] Such as figure 2 As shown, A, B, and C represent three adjacent nodes in the path planned by the A* algorithm, and calculate the area S of the triangle ABC ABC , when S ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More