

A trajectory transition method based on plcopen specification
A trajectory and specification technology, applied in the field of trajectory transition based on PLCopen specification, can solve the problems of not conforming to the specification of PLCopen trajectory transition, inability to intuitively predict the intermediate trajectory of spline, lack of product maturity, etc., to achieve controllable contour accuracy, The interpolation speed is smooth without sudden change, which is convenient for engineering application.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
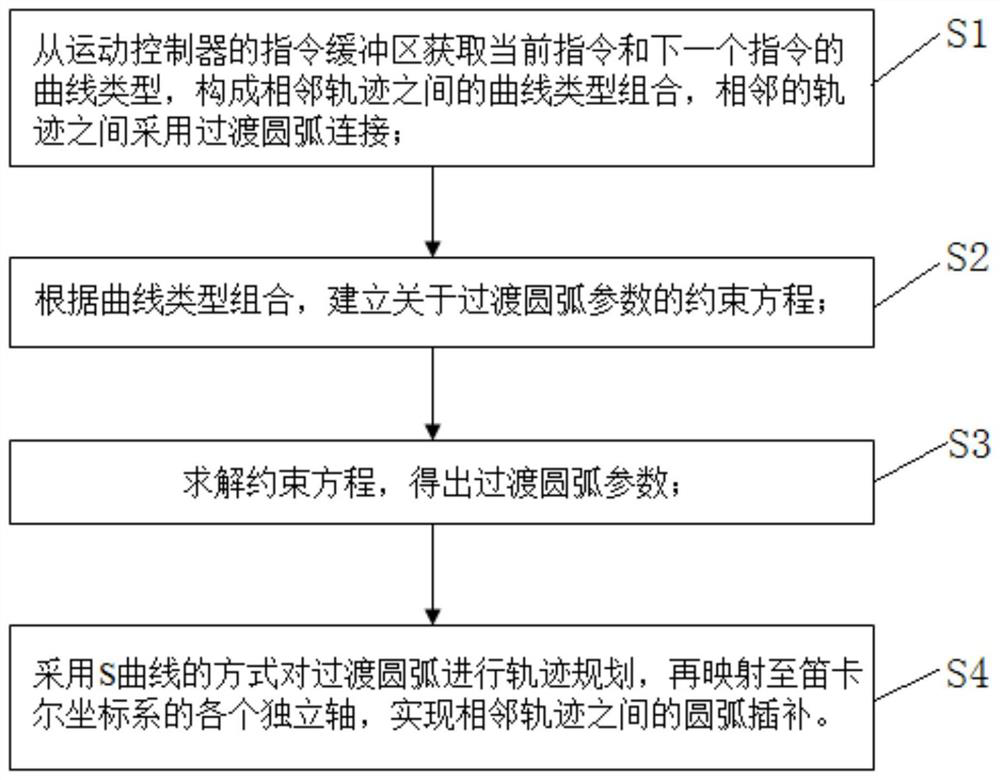
[0051] A trajectory transition method based on PLCopen specification provided by the invention is applied to the field of motion control, and adopts circular interpolation to realize trajectory transition; specifically, the method includes the following steps:
[0052] S1: Obtain the curve type of the current command and the next command from the command buffer of the motion controller to form a combination of curve types between adjacent trajectories, and the adjacent trajectories are connected by transition arcs;
[0053] S2: According to the combination of curve types, establish the constraint equation about the parameters of the transition arc;
[0054] S3: Solve the constraint equation to obtain the transition arc parameters;
[0055] S4: Use the S-curve method to plan the trajectory of the transition arc, and then map it to each independent axis of the Cartesian coordinate system to realize circular interpolation between adjacent trajectories.
[0056] Wherein, the comb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More