

Real-time path planning method for unmanned aerial vehicle based on deep reinforcement learning
A real-time path planning and reinforcement learning technology, applied in vehicle position/route/altitude control, instruments, 3D position/channel control, etc., can solve the problem of inapplicability of algorithms, etc., to improve autonomous flight capability, strong real-time performance and adaptability sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
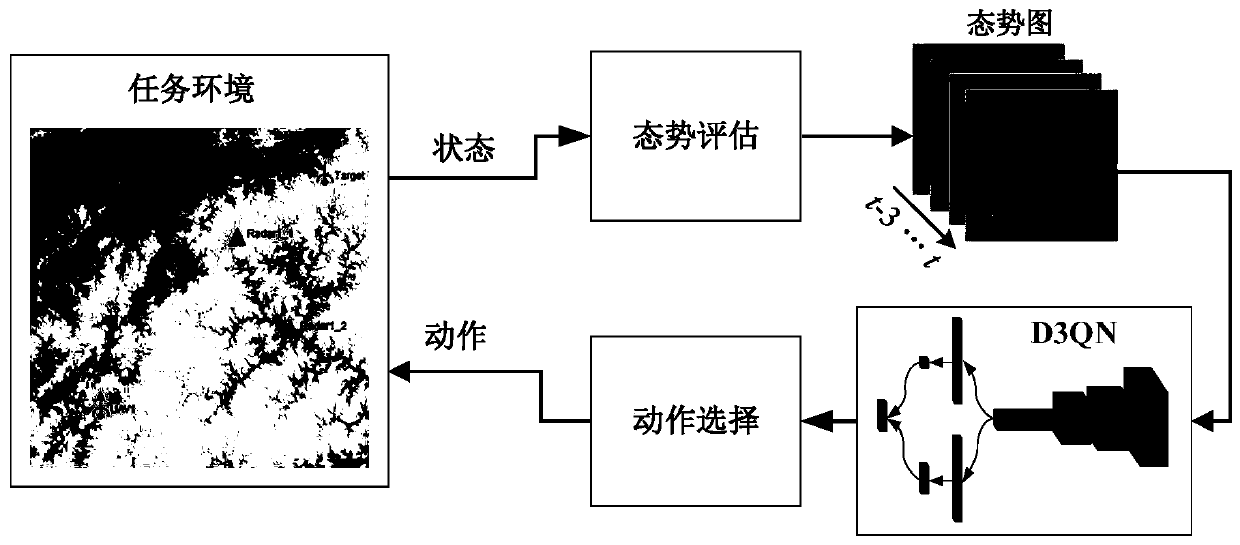
[0047] Such as figure 1 and Figure 6 As shown, a kind of unmanned aerial vehicle real-time path planning method based on deep reinforcement learning of the present invention comprises:
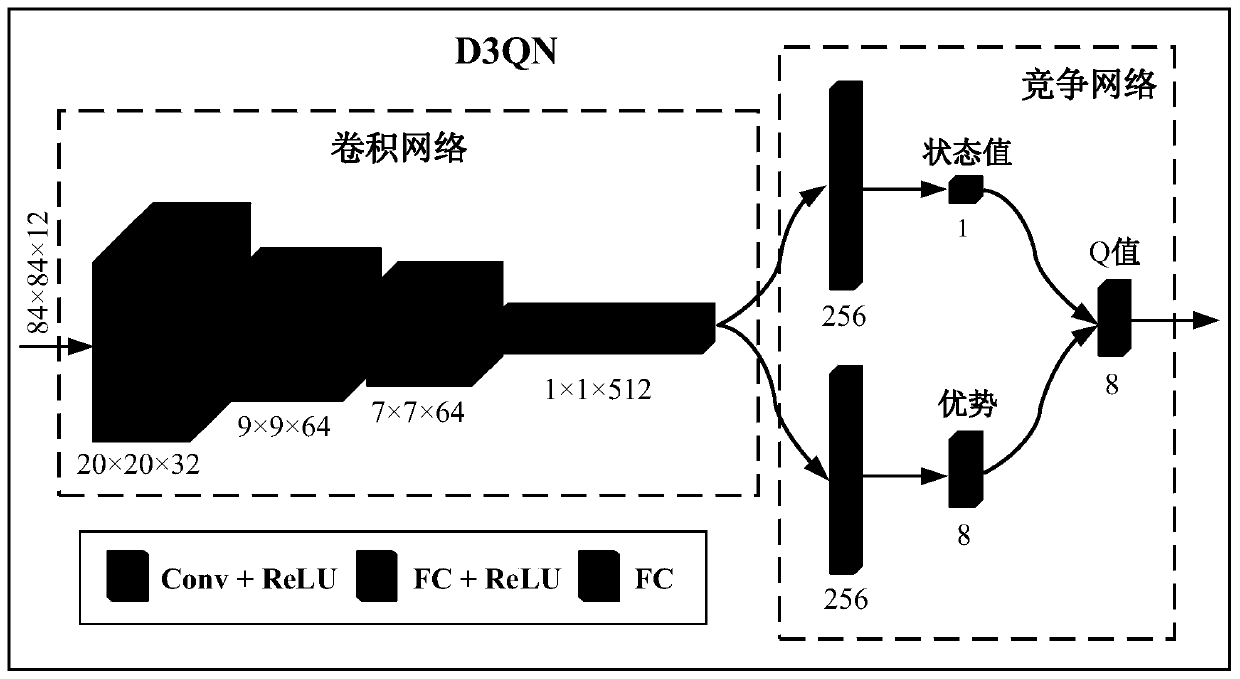
[0048] Step S1, offline training phase: obtain the current environmental state of the UAV from the simulation environment, calculate the threat level of the target defense unit to the UAV according to the situation assessment model, and construct a situation map of the UAV mission area; construct a convolution Main network and target network of neural network and competing neural network for action selection;
[0049] Step S2, online execution stage: According to the current environmental state of the UAV obtained from the communication link, the threat value of the target object defense unit to the UAV is calculated according to the situation asse...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More