

Man-machine cooperation industrial robot drive-control integrated system
An industrial robot and human-machine collaboration technology, applied in the direction of comprehensive factory control, manipulators, manufacturing tools, etc., can solve problems such as large limitations, insufficient accuracy of teaching, and difficulty in interaction and cooperation between machines and operators to achieve accuracy The effect of improving and improving safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
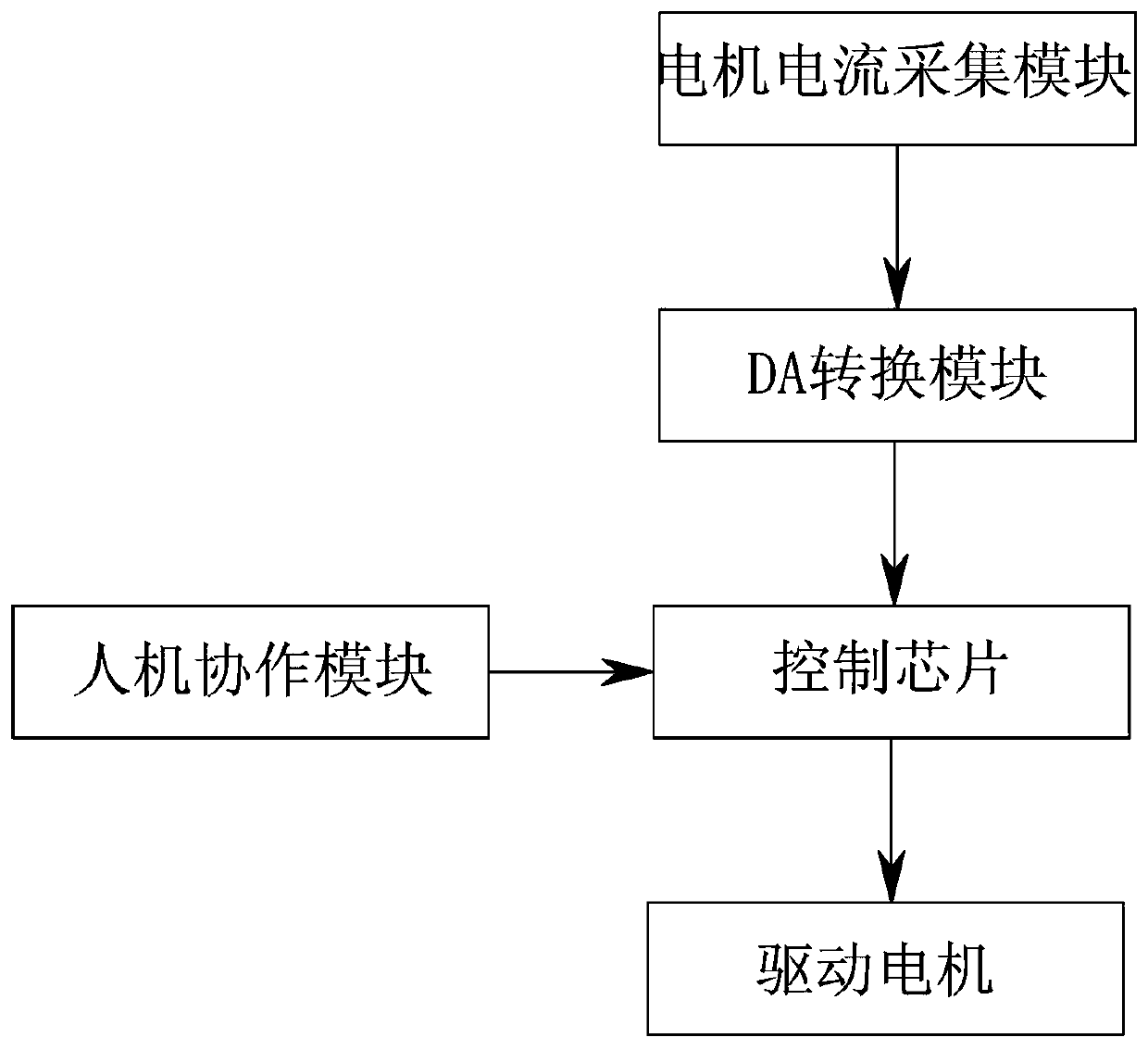
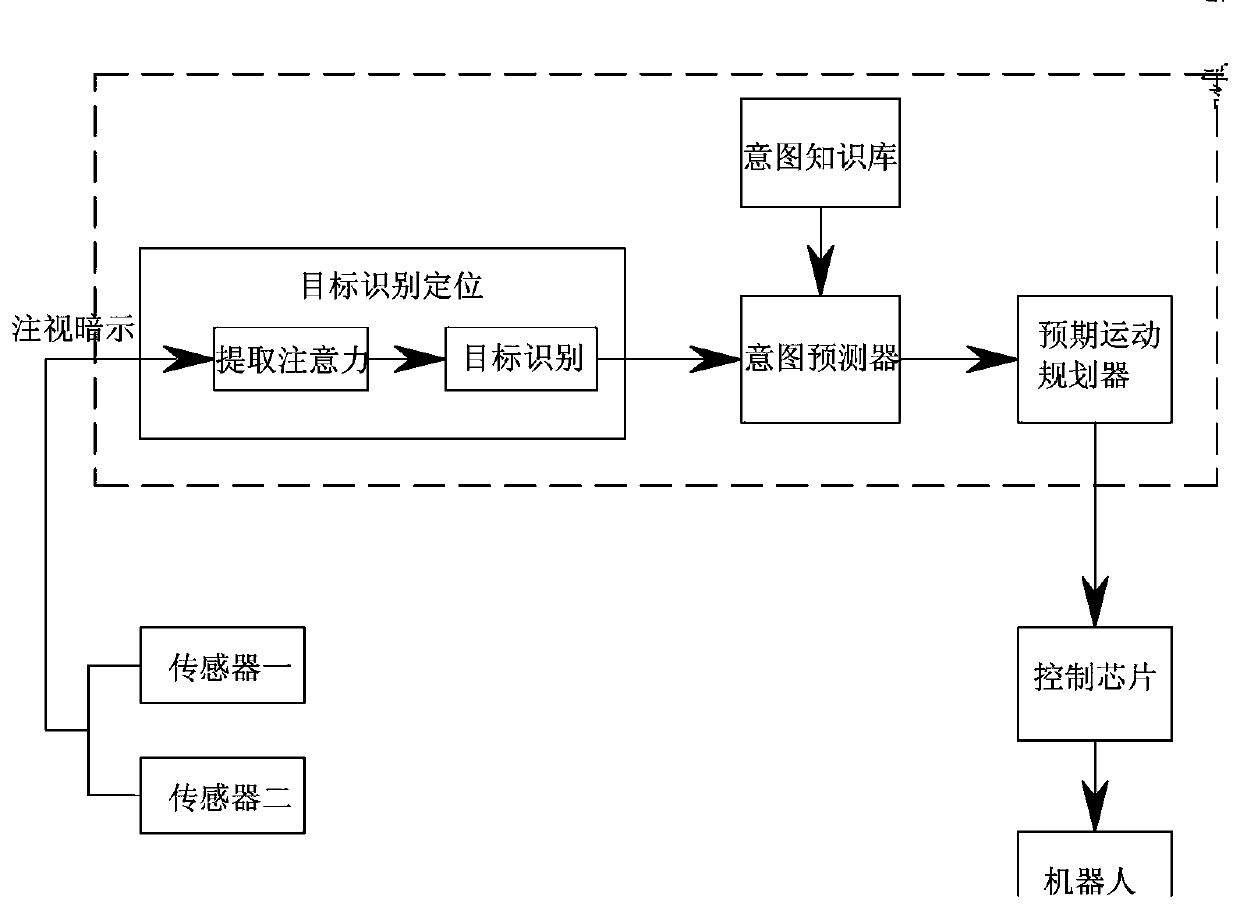
[0021] see Figure 1-2 , an embodiment provided by the present invention: a human-machine collaborative industrial robot driving and control integrated system, including a motor current acquisition module, a DA conversion module, a control chip, a driving motor, and a human-machine cooperation module, the motor current acquisition module The output end is electrically connected to the input end of the DA conversion module, and the output end of the DA conversi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More