

A swarm control method for fixed-wing unmanned aerial vehicles based on reinforcement learning
A technology for strengthening learning and control methods, applied in the field of unmanned aerial vehicles, can solve the problems of complex control of fixed-wing unmanned aerial vehicles and few research results, achieve strong real-time and adaptability, and reduce workload.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
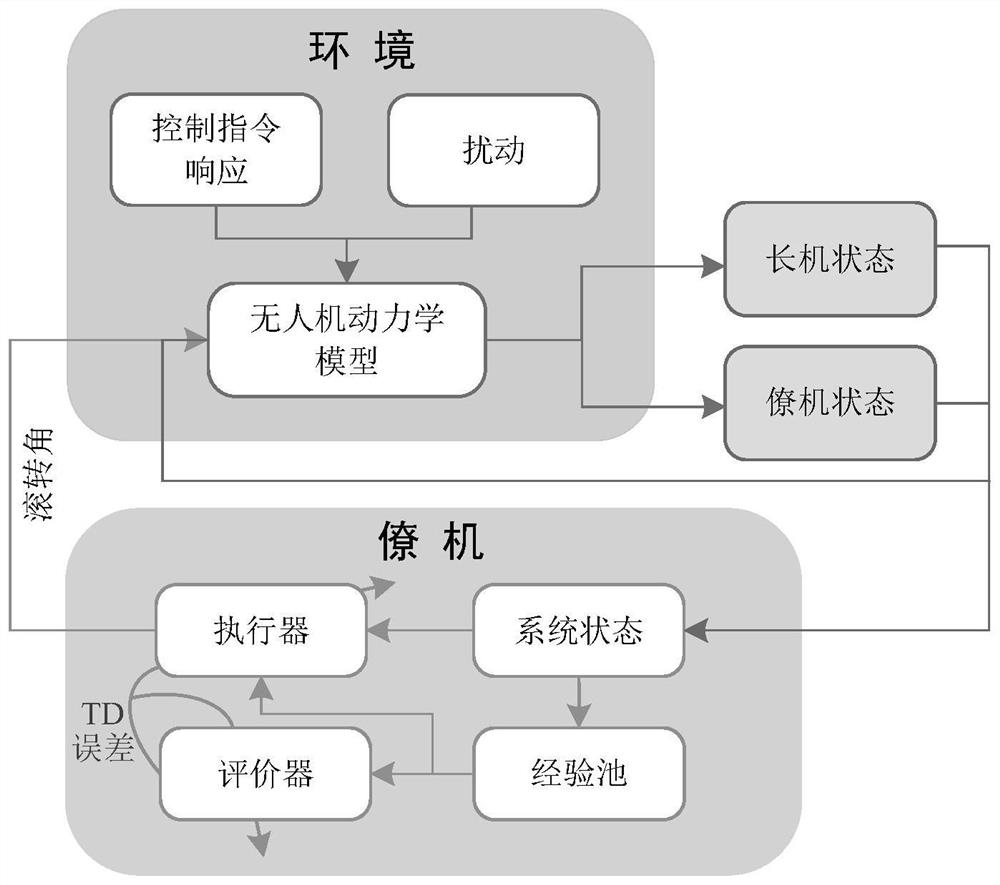
[0033] like figure 1 and Figure 4 As shown, a reinforcement learning-based fixed-wing unmanned aerial vehicle swarm control method of the present invention includes:
[0034] Step S1, training phase: establish a random UAV dynamics model, an actuator deep neural network and an evaluator deep neural network, continuously collect the historical experience of the interaction between the agent and the environment, and store it in the experience pool; randomize from the experience pool Perform batch sampling, continuously update the network parameters of the executor and the evaluator, and finally form a network model for saving the evaluator;
[0035] Step S2, the execution stage: the wingman obtains its own position and attitude information through the sensor, and loads the evaluator network model. The evaluator outputs the optimal roll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More