

Automatic driving path planning method and system, computer-readable storage medium, and vehicle
A path planning and automatic driving technology, applied in the field of parking, to achieve the effect of smooth motion and small angle fluctuations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with accompanying drawing.
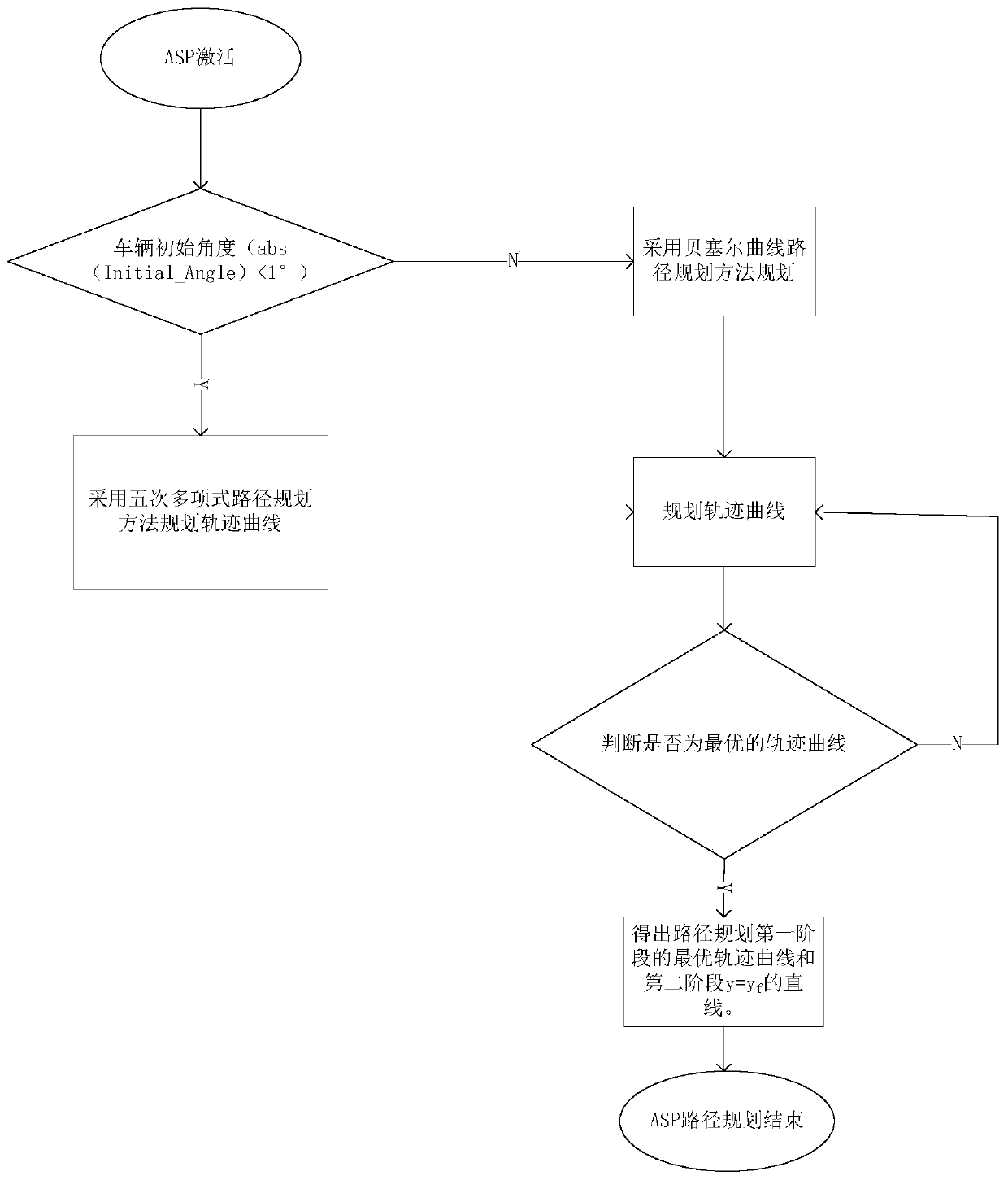
[0022] Such as figure 1 As shown, in this embodiment, a method for planning an automatic driving path includes the following steps:
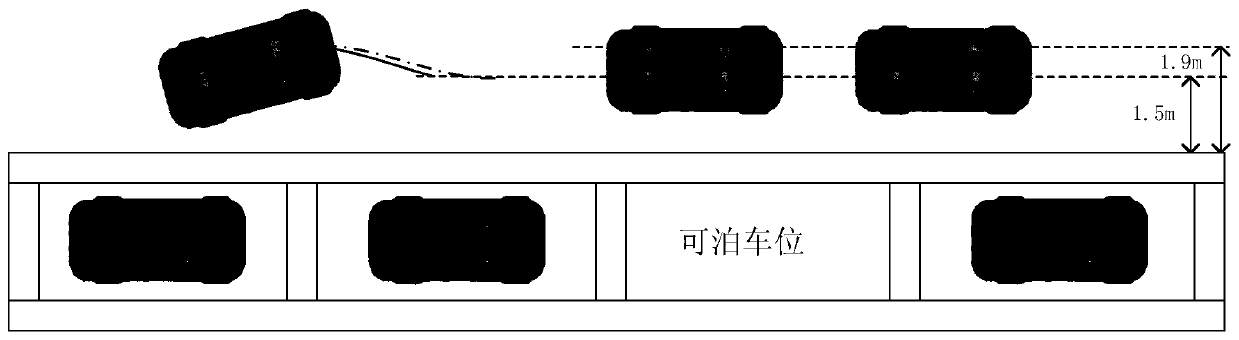
[0023] Obtain the vehicle's initial constraints and vehicle termination constraints, wherein the vehicle's initial constraints include the vehicle's initial pose, initial point velocity, acceleration, and the distance between the vehicle and the parking space line, and the vehicle's termination constraints include the vehicle's termination lateral position and posture ;
[0024] The path planning from the initial pose to the end pose is carried out based on the initial constraints of the vehicle and the termination constraints of the vehicle. The whole process is divided into two stages. The first stage is to plan the path as a smooth curve, and the second stage is to plan the path as a straight line.
[0025] (1) Planning for the first st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More