

A robot bottom moving mechanism
A mobile mechanism and robot technology, applied in the field of robotics, can solve the problems of robot parts damage, speed drop, easy bump, increase, etc., achieve the effect of torque and speed coordination, reduce vibration, increase torque and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
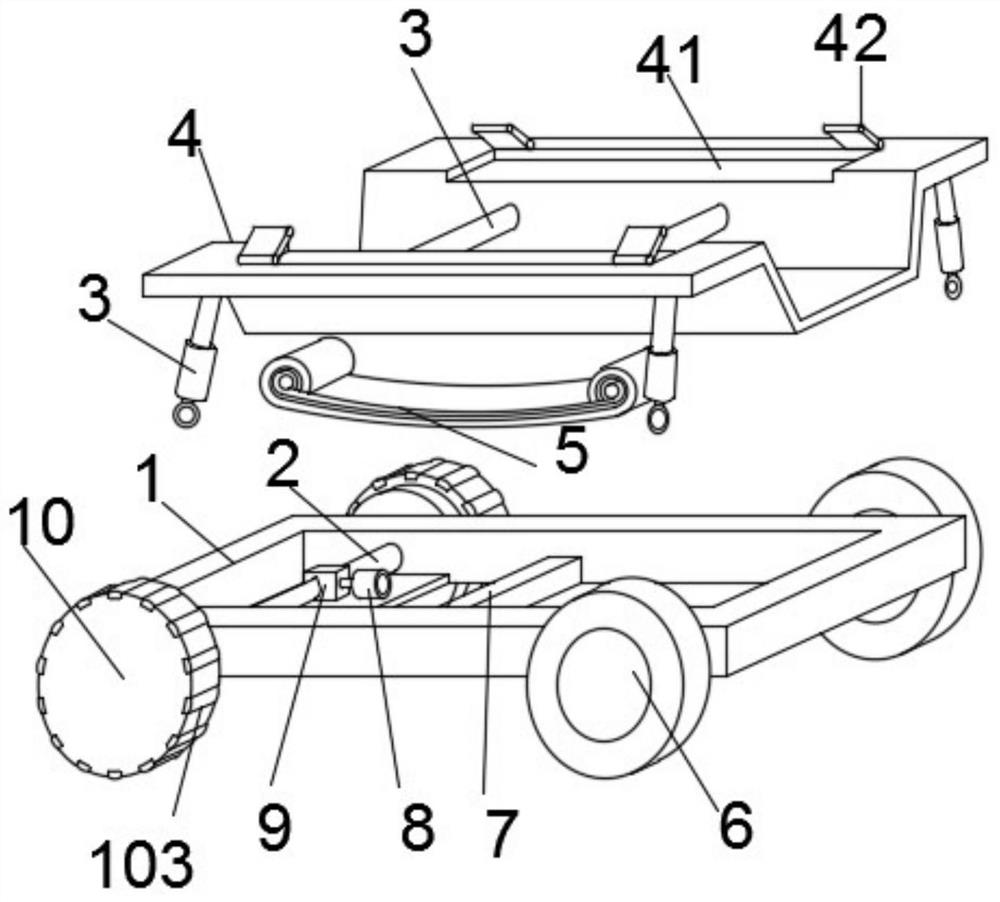
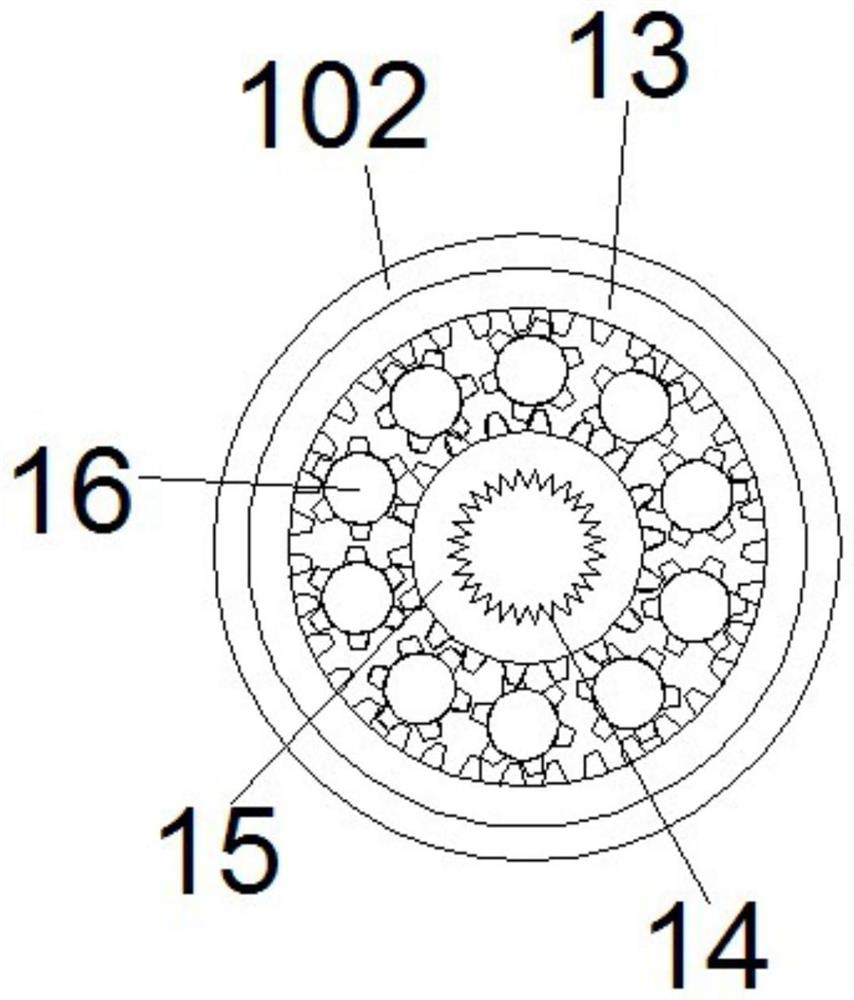
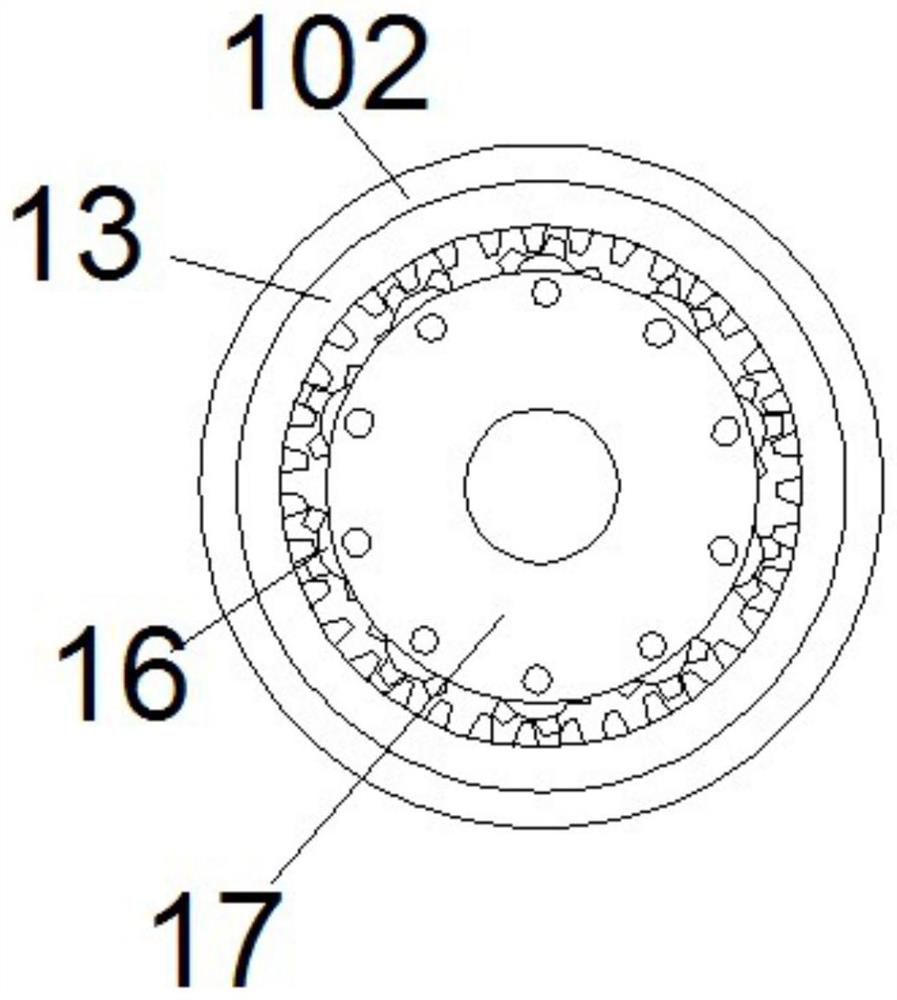
[0031] see Figure 1-6 , the present embodiment provides a robot bottom moving mechanism and its use method, comprising a moving frame 1 and a trapezoidal structure bearing plate 4 with an upper opening, and a leaf spring 5 for installing a leaf spring 5 is fixedly installed between the inner side walls of the moving frame 1 The installation shaft 7 of the moving frame 1 is fixedly installed with a drive axle 2 at one end of the inner side of the moving frame 1, and a gear box 9 is fixedly installed in the middle of the drive axle 2, and a motor 8 is installed on one side of the gear box 9 for rotation. The gear box 9 is fixedly connected with the driving wheel 10 through the transmission shaft 18, the middle part of the bottom surface of the bearing plate 4 is connected with the mobile frame 1 through the leaf spring 5, and shock absorbers are installed on both sides of the bottom of the bearing plate 4 through the rotation of the pin shaft. A 3, and the shock absorber A 3 an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More