

Kinect-based robot teaching programming guiding method
A technology of robots and industrial robots, applied in the field of computer vision, can solve the problems of long programming time, occupying robot operation time, and difficulty in achieving results, and achieves the effect of lowering the programming threshold and simplifying teaching programming.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
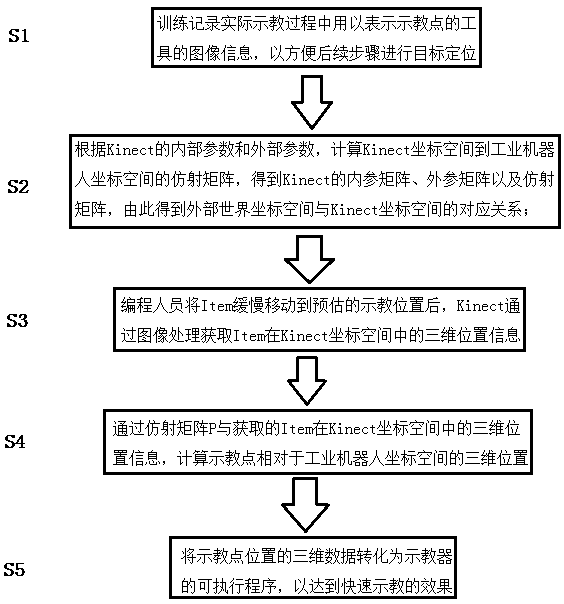
[0026] Such as figure 1 As shown, the present invention provides a kind of robot teaching programming guide method based on Kinect, comprises the steps:
[0027] Step S1, training and recording the image information of the tool (Item) used to represent the teaching point during the actual teaching process, so as to facilitate target positioning in subsequent steps;
[0028] Step S2, according to the internal parameters and external parameters of Kinect (camera calibration toolkit such as GMLCalibration Toolbox can be used, and the calibration principle is chessboard calibration method-Zhang Zhengyou calibration), calculate the affine matrix from the Kinect coordinate space to the industrial robot coordinate space, and obtain the Kinect internal reference matrix Extrinsic matrix and the affine matrix From this, the corresponding rel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More