

Industrial robot joint active damping device and robot
An industrial robot and active vibration reduction technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of slow attenuation vibration speed, poor reliability, and shortened service life, and achieve good vibration impact, buffer vibration impact, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention is further described in conjunction with the following examples.
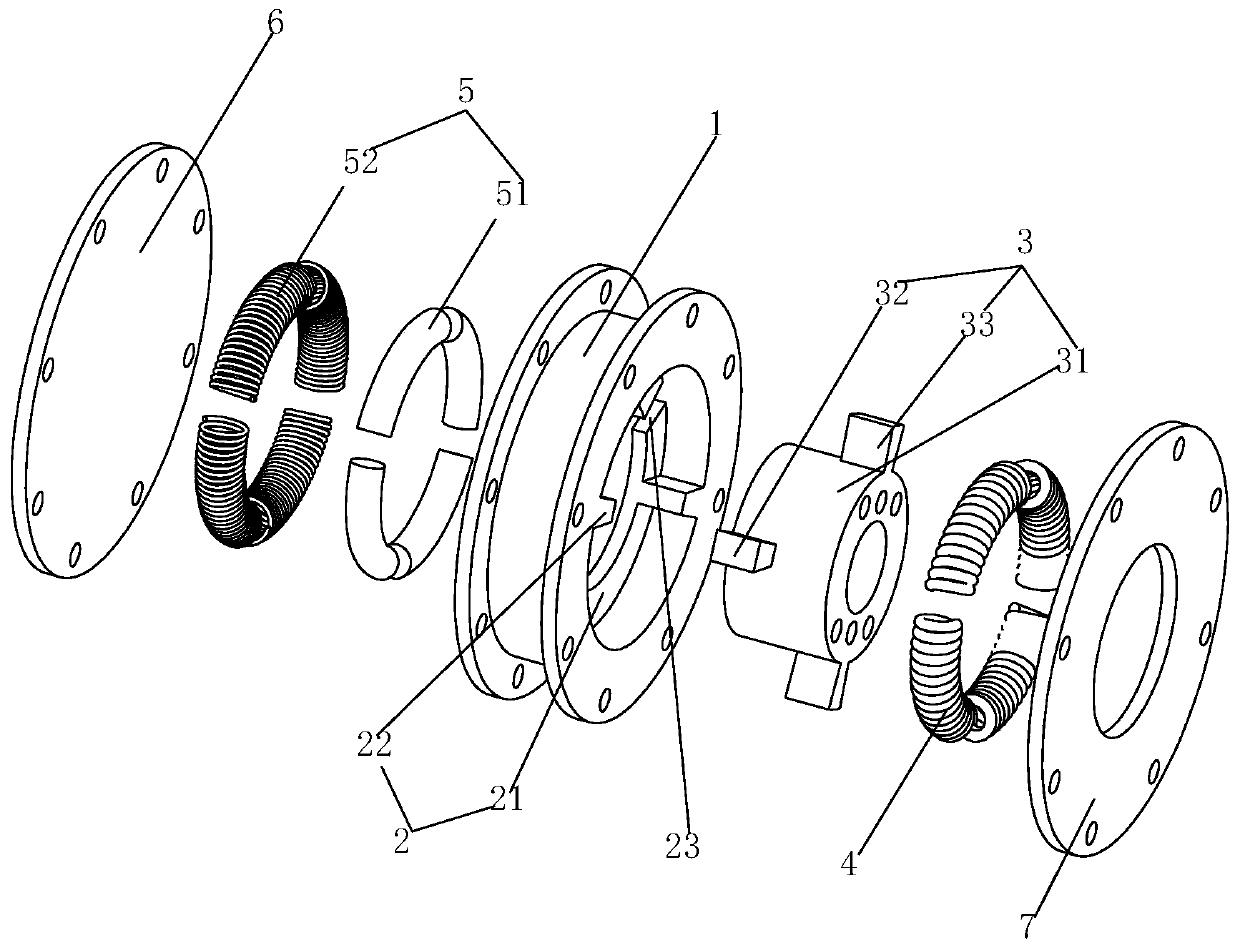
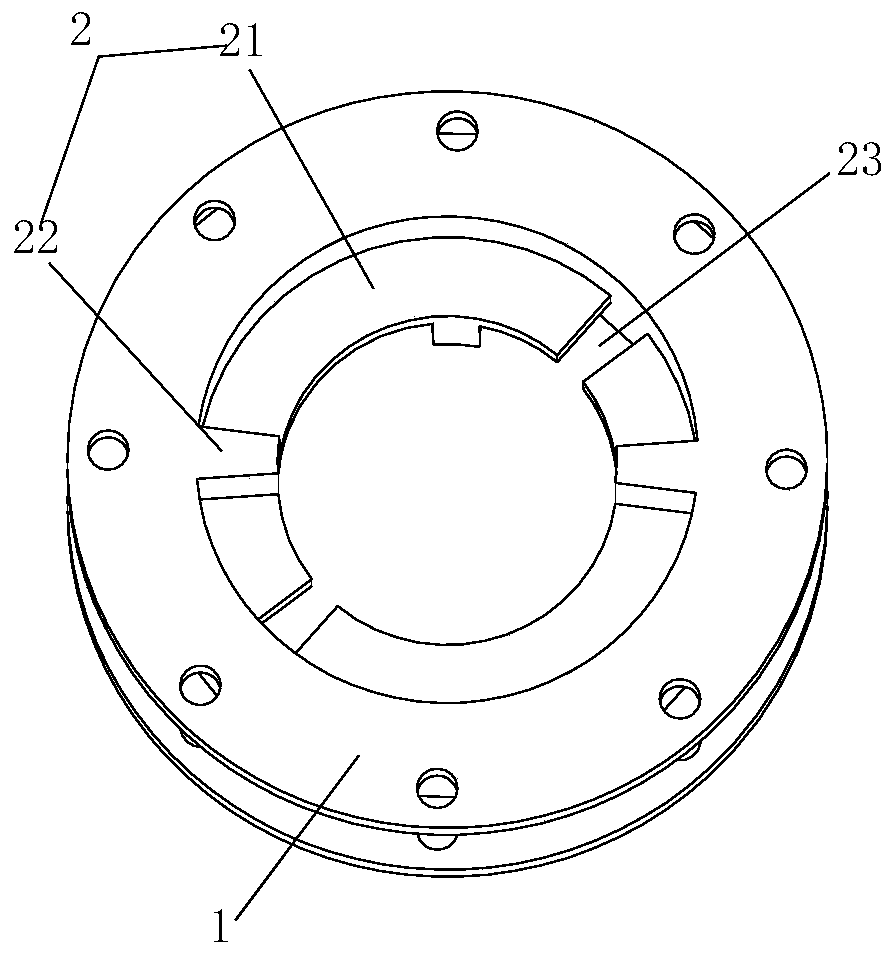
[0039] like Figure 1 to Figure 2 , an active damping device for an industrial robot joint, comprising a housing 1 , a retaining ring part 2 , a connecting element 3 , an elastic element 4 and an active damping and vibration damping assembly 5 . Wherein, the housing 1 has a cavity; the cavity is cylindrical. The retaining ring part 2 is arranged on the inner side wall of the housing 1 and is located in the cavity; the connecting element 3 is matched and nested in the inner ring of the retaining ring part 2 and can rotate relative to the retaining ring part 2; elastic The element 4 is nested in the cavity formed between the housing 1, the connecting element 3 and the retaining ring part 2 and is located on the right end surface of the retaining ring part 2; the active damping and vibration reduction assembly 5 is nested in the The cavity formed between the housing 1 , the connectin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More