

Offline map matching method and system based on complex trajectory network division model
A technology of network division and offline map, which is applied to road network navigators and other directions, can solve problems such as time-consuming, and achieve the effect of balancing the relationship between efficiency and accuracy, high precision, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
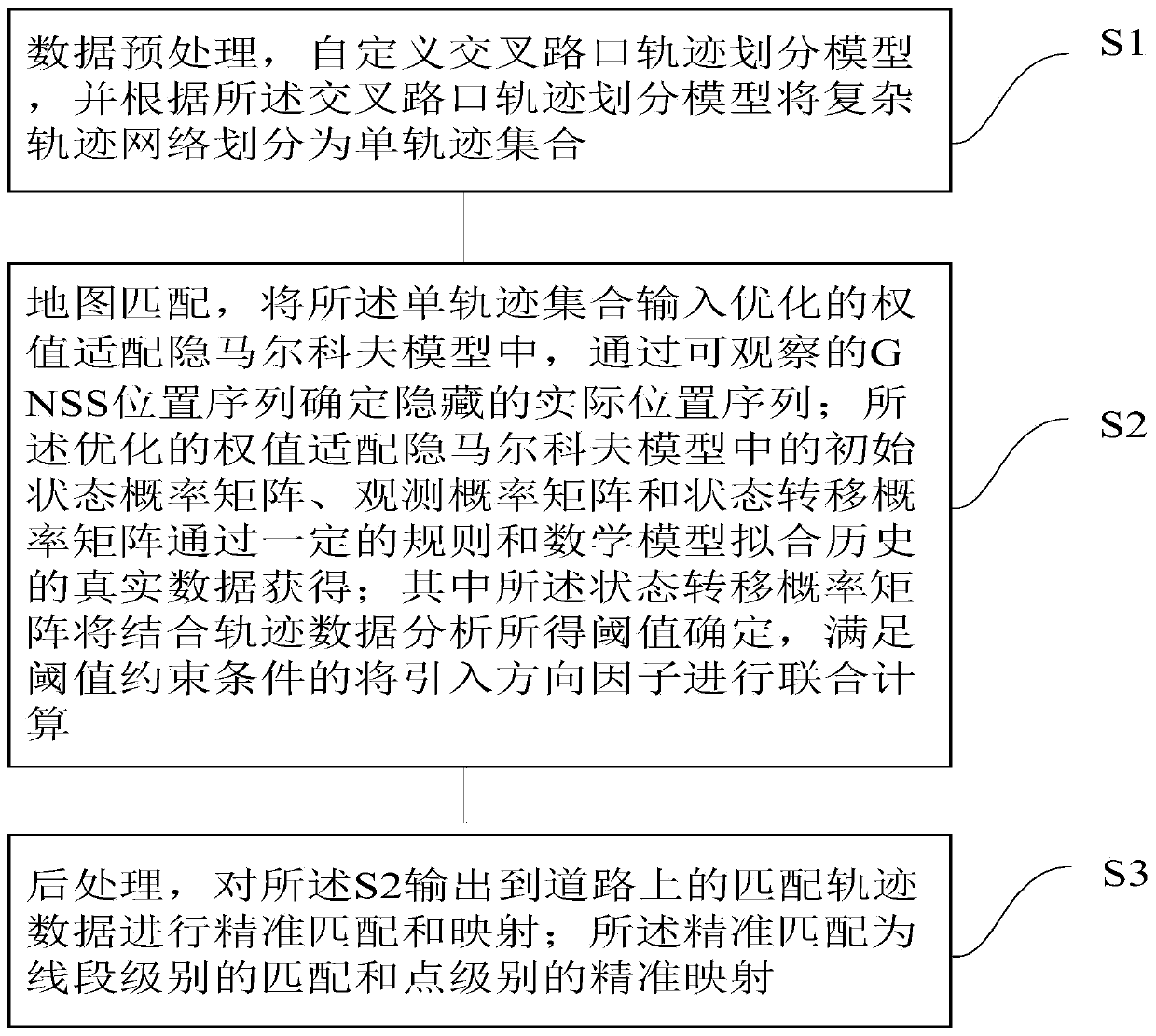
[0062] Such as figure 1 As shown, the offline map matching method based on the complex road network division model of the present invention includes the following steps: S1: data preprocessing, custom intersection trajectory division model, and according to the intersection trajectory division model, the complex trajectory network is divided into Single track set; S2: map matching, the single track set is input into the optimized weight fitting hidden Markov model, and the hidden actual position sequence is determined through the observable GNSS position sequence; the optimized weight value adapts The initial state probability matrix, observation probability matrix and state transition probability matrix in the hidden Markov model are obtained by fitting historical real data through certain rules and mathematical models; the state transition probability matrix will be obtained by combining trajectory big data analysis The threshold is determined, and if the threshold constrain...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More