

Robust control method of active suspension system based on time-varying displacement constraint
A technology of active suspension and robust control, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve problems such as fault-tolerant control of suspension system with little attention
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
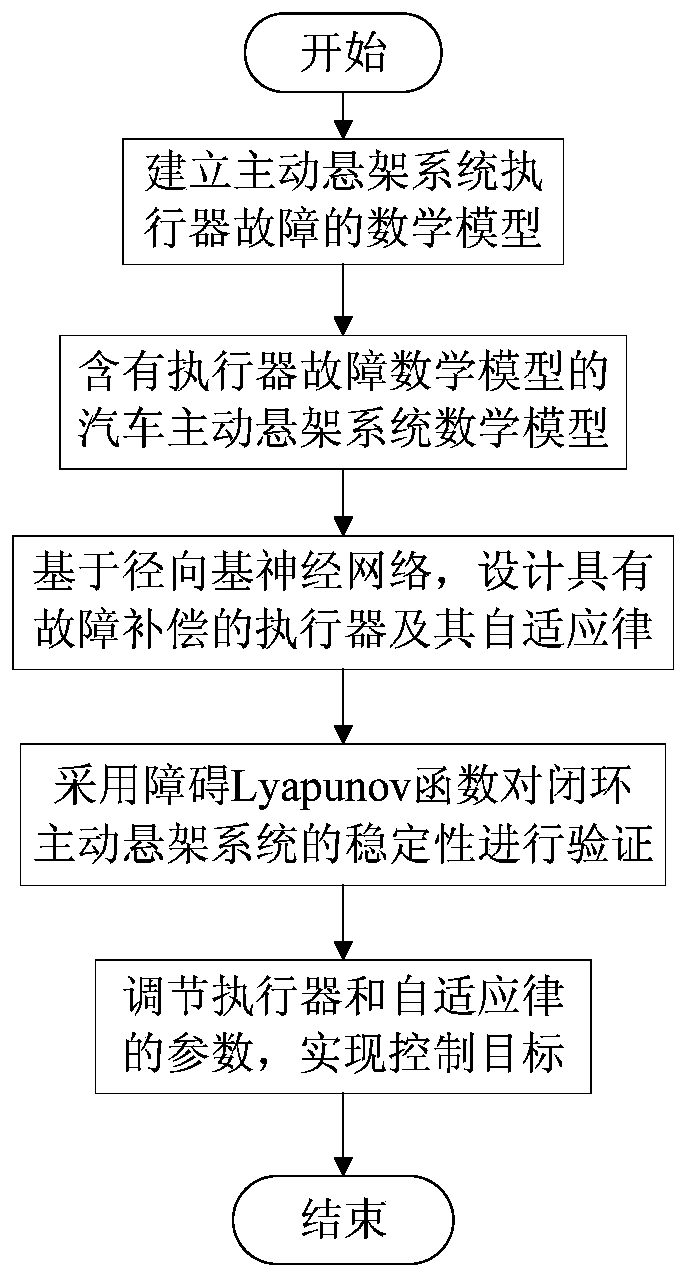
[0090] Such as figure 1 As shown, the method of this embodiment is as follows.
[0091] Step 1: Establish a mathematical model of the actuator failure of the active suspension system:
[0092]
[0093] where u is the actuator output signal in the active suspension system, u c is the actuator input signal, T f is the fault occurrence time, ρ is the failure factor, θ represents the deviation from the fault, and there is a constant ρ and so that the following inequalities hold:
[0094]
[0095] When the actuator deviates from the fault, ρ=0, θ≠0, at this time u c No longer works, deviates to the fault value θ;
[0096] When the actuator fails, ρ∈(0,1), θ=0, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More