

Self-adaptive control method based on characteristic model
A technology of adaptive control and characteristic model, which is applied in the direction of adaptive control, general control system, control/regulation system, etc. It can solve the problems that the coefficient constant bound of the characteristic model is difficult to determine, cannot be calculated, and has no solution.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] The present invention will be described in detail below in conjunction with the accompanying drawings.
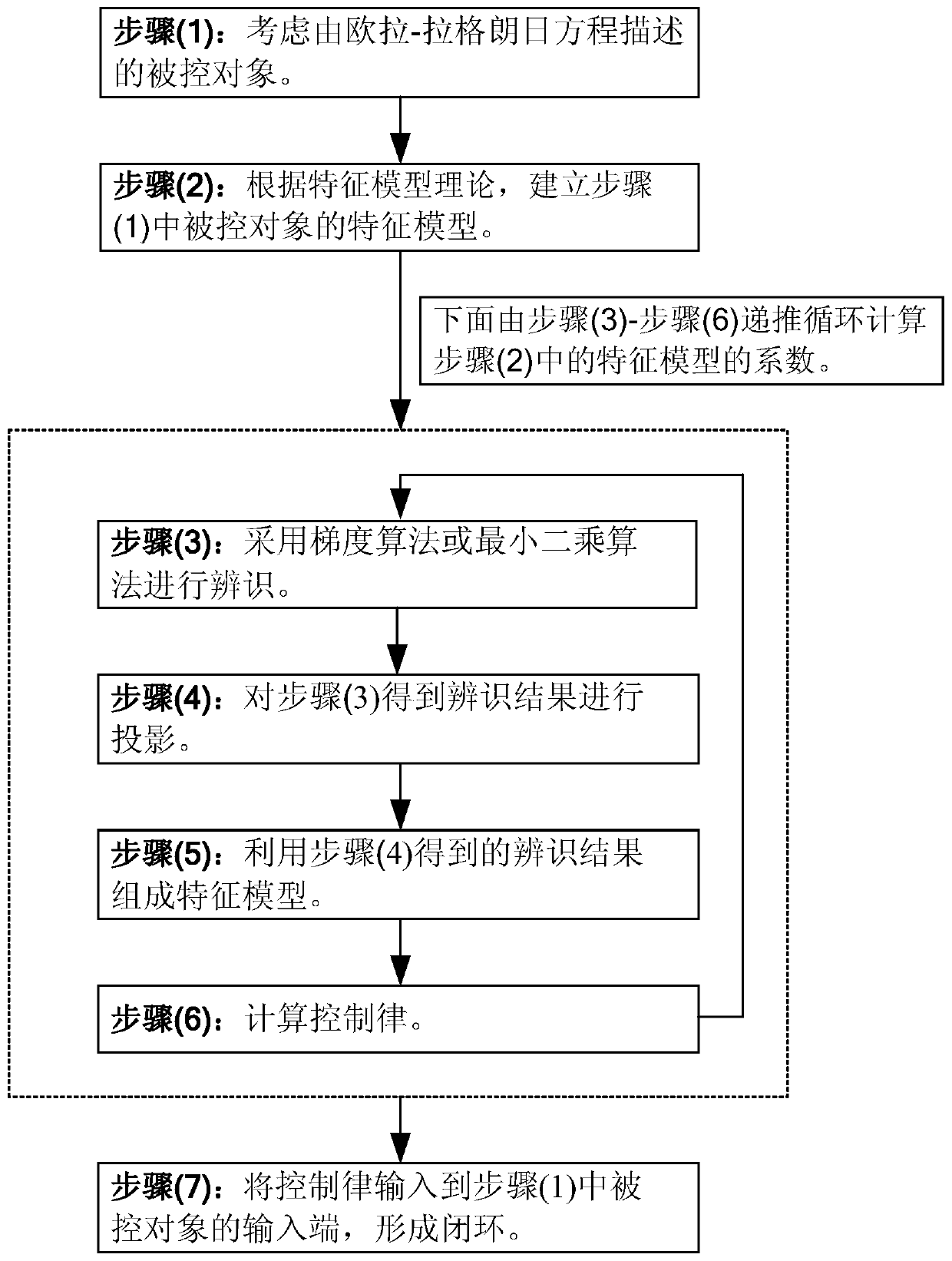
[0068] The method of the invention proposes the state-related coefficient bound and its identification method, solves the modeling problem of the characteristic model, and realizes the self-adaptive control of the Euler-Lagrangian controlled object on this basis. Such as figure 1 As shown, the present invention is realized through steps (1)-step (7).
[0069] step 1)
[0070] The controlled object is represented by the following Euler-Lagrangian equation:
[0071]
[0072] where, q∈R p are the generalized coordinates, is the generalized velocity, is the generalized acceleration, M(q)∈R p×p is the symmetric positive definite inertia matrix, is the Coriolis force, G(q)∈R p is generalized powerful, τ∈R p is the generalized control torque, and R represents the real number space.
[0073] System formula (1) satisfies the following properties:
[0074] Pro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More