

An Adaptive Control Method Based on Feature Model
A technology of adaptive control and characteristic model, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as inapplicability of transient state, inability to calculate, difficulty in determining the coefficient constant bound of characteristic model, etc., to achieve Solve the problem of parameter identification, improve performance, and achieve good versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0068] The present invention will be described in detail below with reference to the accompanying drawings.
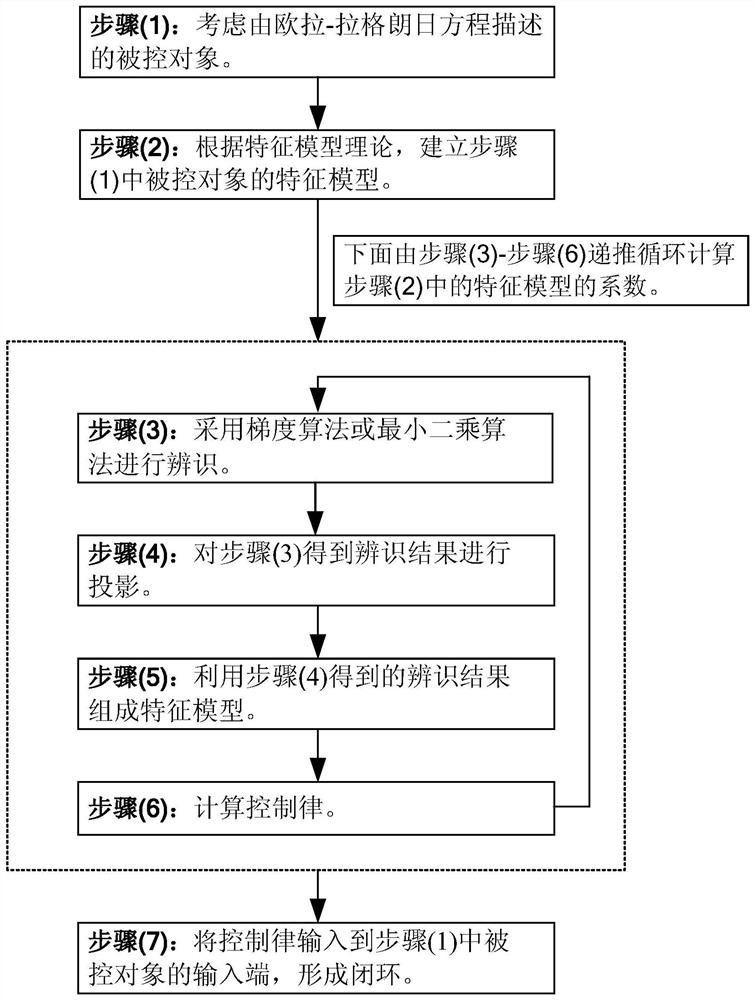
[0069] The method of the invention proposes a state-related coefficient bound and an identification method, solves the modeling problem of the characteristic model, and realizes the self-adaptive control of the Euler-Lagrangian controlled object on this basis. like figure 1 As shown, the present invention is implemented through steps (1) to (7).
[0070] step 1)
[0071] The controlled object is represented by the following Euler-Lagrange equation:
[0072]
[0073] where q∈R p are generalized coordinates, is the generalized velocity, is the generalized acceleration, M(q)∈R p×p is the symmetric positive definite inertia matrix, is the Coriolis force, G(q)∈R p is the generalized powerful, τ∈R p is the generalized control torque, and R represents the real number space.
[0074] The system formula (1) satisfies the following properties:
[0075] Property ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More