

A steering return and intermediate position control system and control method thereof
An intermediate position and control method technology, applied to steering mechanisms, electric steering mechanisms, power steering mechanisms, etc., can solve problems such as overshooting and chattering at high speeds, poor control accuracy in the center area, and insufficient backing at low speeds. Achieve fast response, high stability, improve stability and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
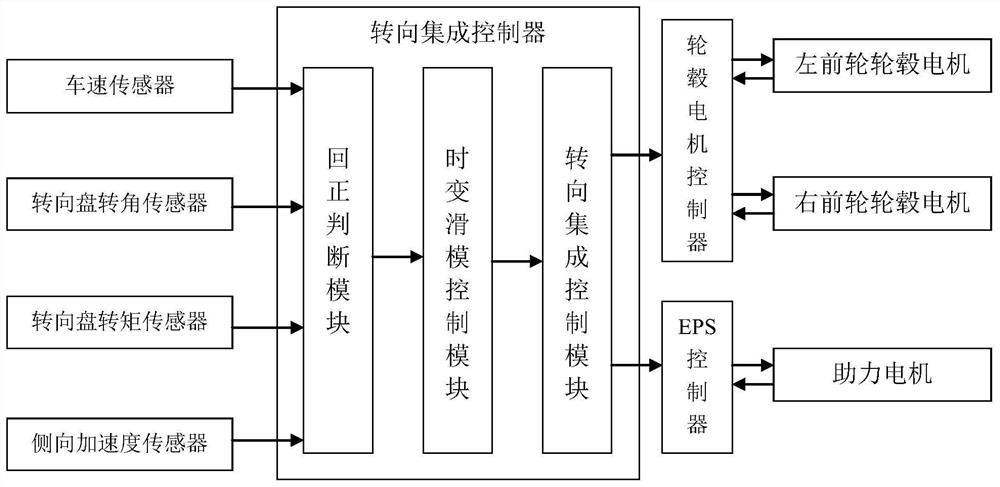
[0032] Such as figure 1 As shown, a steering return and intermediate position control system based on differential steering and EPS designed in the present invention includes a steering integrated controller, and the steering integrated controller includes a return-to-alignment judgment module, a time-varying sliding mode control module, The steering integrated control module, the input terminal of the centering judgment module is respectively connected to the vehicle speed sensor, the steering wheel angle sensor, the lateral acceleration sensor, and the steering wheel torque sensor; the output of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More