

Construction method of indoor 3D point cloud semantic map
A semantic map and point cloud technology, applied in the field of deep learning, can solve the problems of lack of ability of robots to understand the environment, lack of semantic information of objects, etc., to achieve the effect of human-computer interaction and semantic perception, reduce the amount of calculation, and shorten the time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0022] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings. The description here is only for explaining the present invention, and is not intended to limit the present invention.
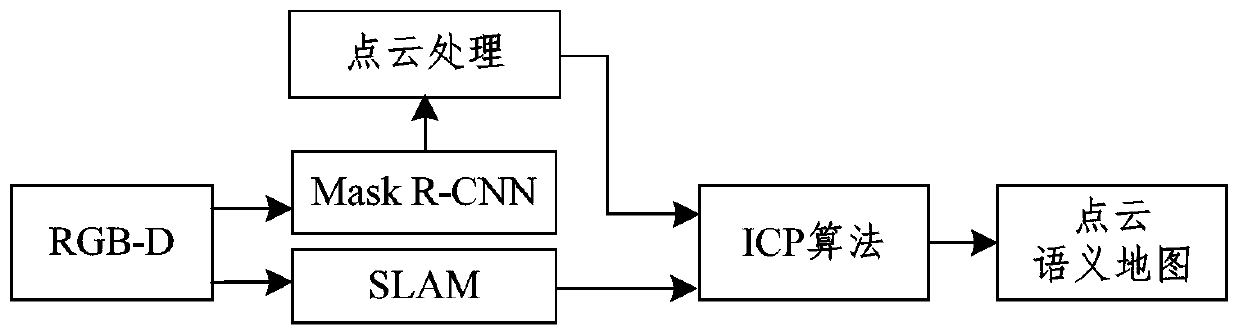
[0023] The purpose of the present invention is to provide a method for constructing an indoor 3D point cloud semantic map. The present invention combines deep learning with point cloud maps to construct point cloud semantic maps, performs target detection and semantic segmentation through deep convolutional neural networks (MaskR-CNN), and then performs point cloud fusion with the constructed indoor 3D point cloud maps Obtain the point cloud semantic map, its principle block diagram is attached figure 1 shown. Specific steps are as follows:
[0024] Step 1: Use the RGB-D camera to obtain the indoor env...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More