

Mechanical claw for changing grabbing manner through deformation
A technology of mechanical claw and six-bar mechanism, applied in the field of mechanical claw, can solve the problems of crowding, single parameters such as the shape and size of the work object, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] The present invention will be described in detail below in conjunction with specific embodiments.
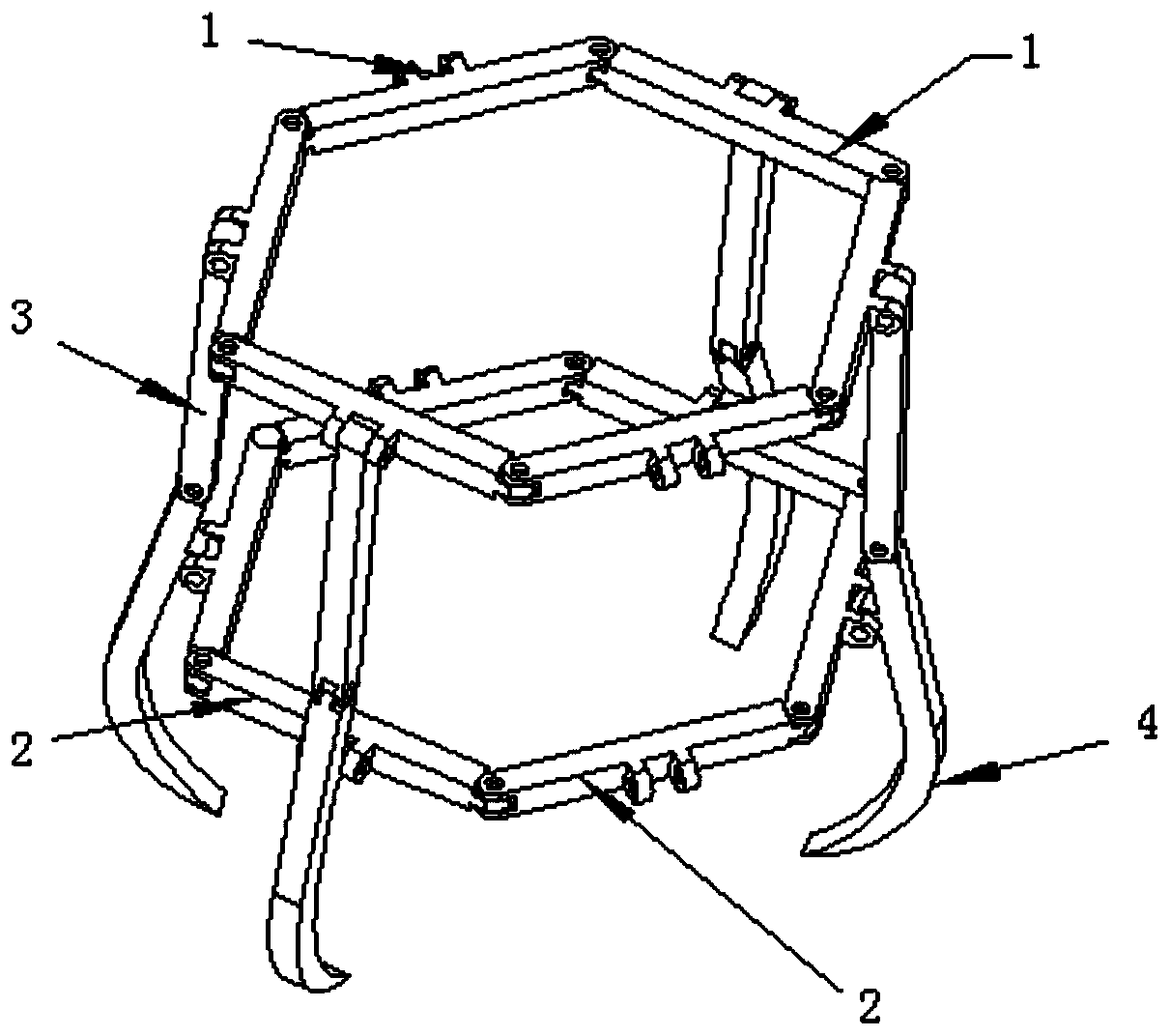
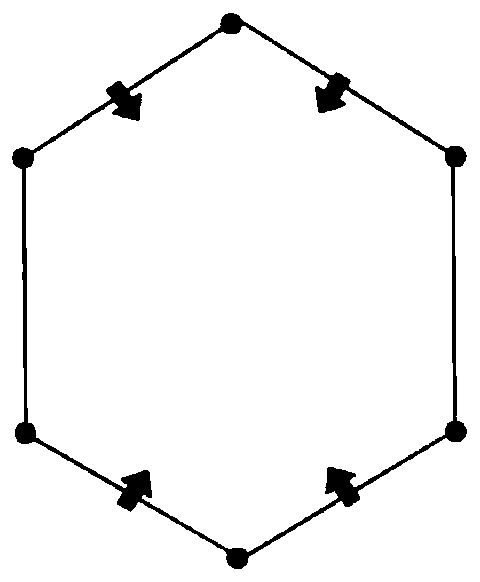
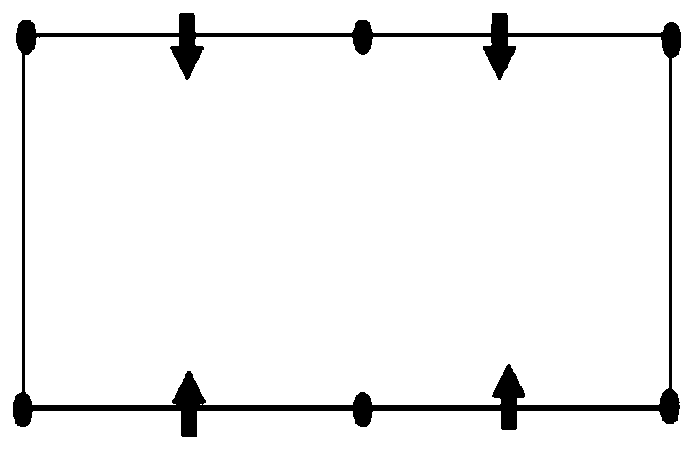
[0012] The mechanical claw of the present invention such as figure 1 As shown, it includes an upper six-bar mechanism 1, a lower six-bar mechanism 2, a finger joint rod 3, and a finger 4; the upper six-bar mechanism 1 and the lower six-bar mechanism 2 are composed of six identical connecting rods in turn end to end. The four links in the upper six-bar mechanism 1 are respectively connected to the four finger joint rods 3, the four finger joint rods 3 are respectively connected to the four fingers 4, and the four fingers 4 are respectively connected to the four fingers of the lower six-bar mechanism 2. A connecting rod is rotatably connected between the various components through a hinged way. The four finger joint rods 3 are arranged symmetrically in pairs, and the four finger joint rods 3 are vertically connected to the upper six-bar mechanism 1 and the lower six-bar mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More