

Clamper for robot paintbrush
A technology of robots and clamps, applied to instruments, educational tools, teaching models, etc., can solve problems such as breaking, shrinkage, and inaccurate motion track data, and achieve the effect of quick disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The technical solution of the present invention is further described below, but the scope of protection is not limited to the description.
[0027] see figure 1 , figure 2 , image 3 , Figure 4 .
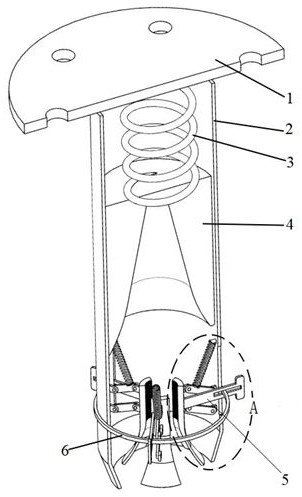
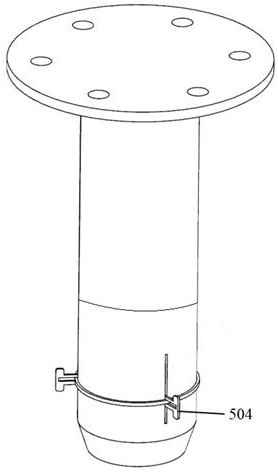
[0028] A clamper for a robot paintbrush according to the present invention comprises a flange cover 1;
[0029] Pen container 2, the top surface of the pen container 2 is welded or bonded to the bottom surface of the flange cover 1;
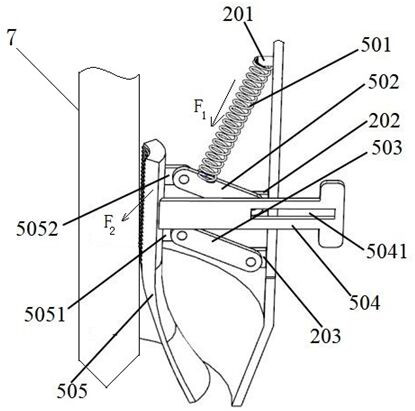
[0030] Spring A3, sleeve 4, and sleeve 4 are slidably installed inside the pen container 2, and the two ends of spring A3 are respectively in contact with or bonded to flange cover 1 and sleeve 4, and the middle part of sleeve 4 is provided with a tapered mounting bracket for paintbrush 7. hole;
[0031] A plurality of buffer clamping mechanisms 5, a plurality of buffer clamping mechanisms 5 for clamping a paintbrush 7 are fixedly installed on the bottom of the pen holder 2.
[0032] In order to realize the buffering and clamping functi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More