Denoising method for 3D point cloud data
A 3D point cloud and data technology, applied in the field of data processing, can solve the problems of image edge detail information distortion, noise filtering effect and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
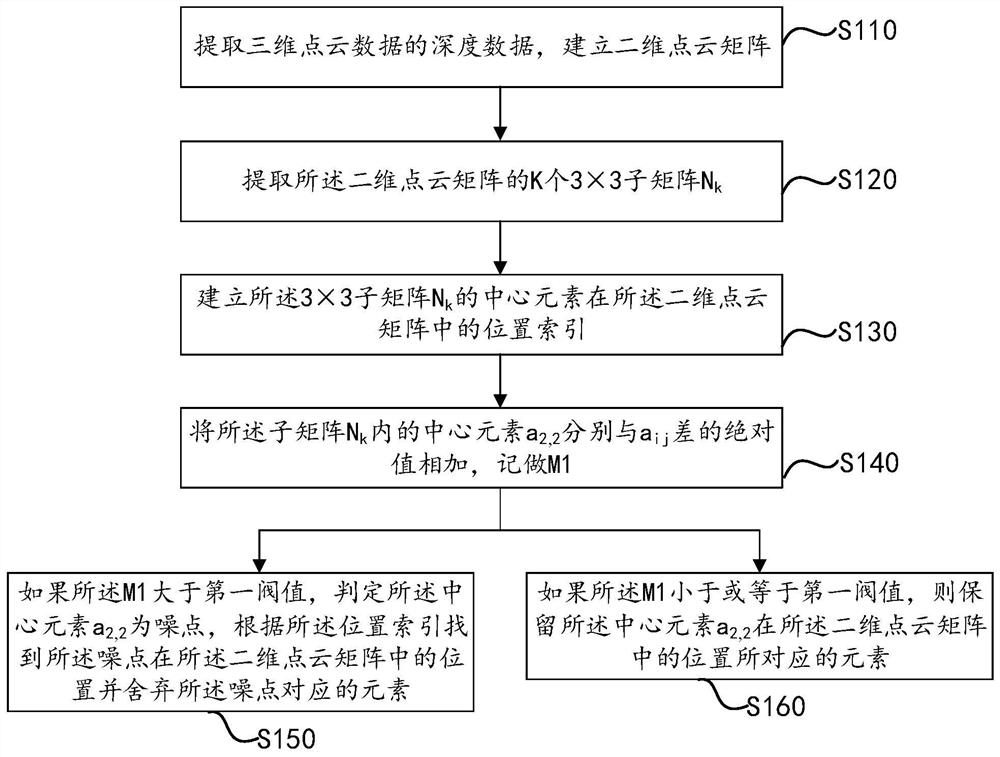
[0029] figure 1 The flow chart of the denoising method for 3D point cloud data provided by the embodiment of the present invention. Such as figure 1 As shown, the method includes:
[0030] Step S110, extracting the depth data of the three-dimensional point cloud data, and establishing a two-dimensional point cloud matrix, and the elements in the two-dimensional point cloud matrix are the depth data.
[0031] Specifically, the acquisition of 3D point cloud data is the 3D coordinates of the 3D image captured by the time-of-flight sensor. The 3D coordinates are stored in the sensor chip through a pixel array, and the 3D coordinates used are values generated based on the sensor coordinate system. It includes position information of the measured object on a projection plane and depth information of the measured object,...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap