Collaborative operation support device
A technology of coordinated actions and auxiliary devices, applied in image enhancement, program control, comprehensive factory control, etc., can solve problems such as difficult to grasp control parameters intuitively
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
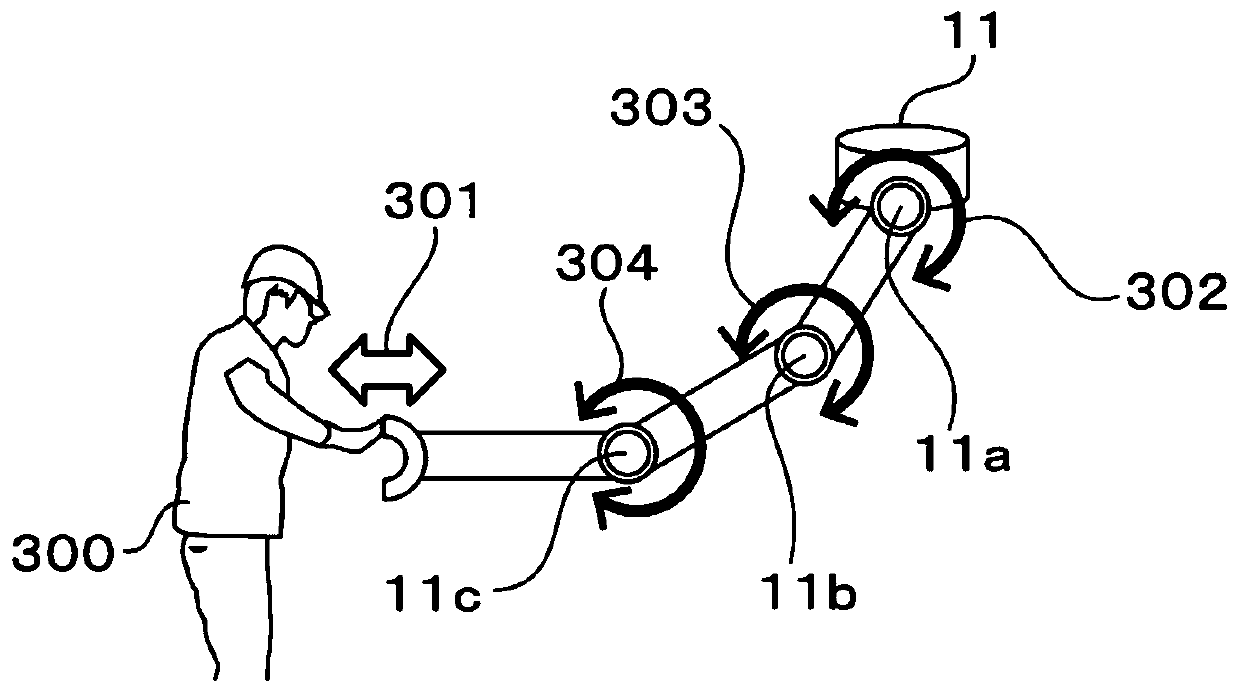
[0016] Hereinafter, the cooperation assisting device will be described with reference to the drawings. This cooperative motion assisting device enables the operator to intuitively grasp the settings related to the motion of the robot by displaying display data on a transmissive display worn by the operator. The robot is associated with the part of the robot associated with the specified motion pattern, and represents the motion of the robot in the specified motion pattern.
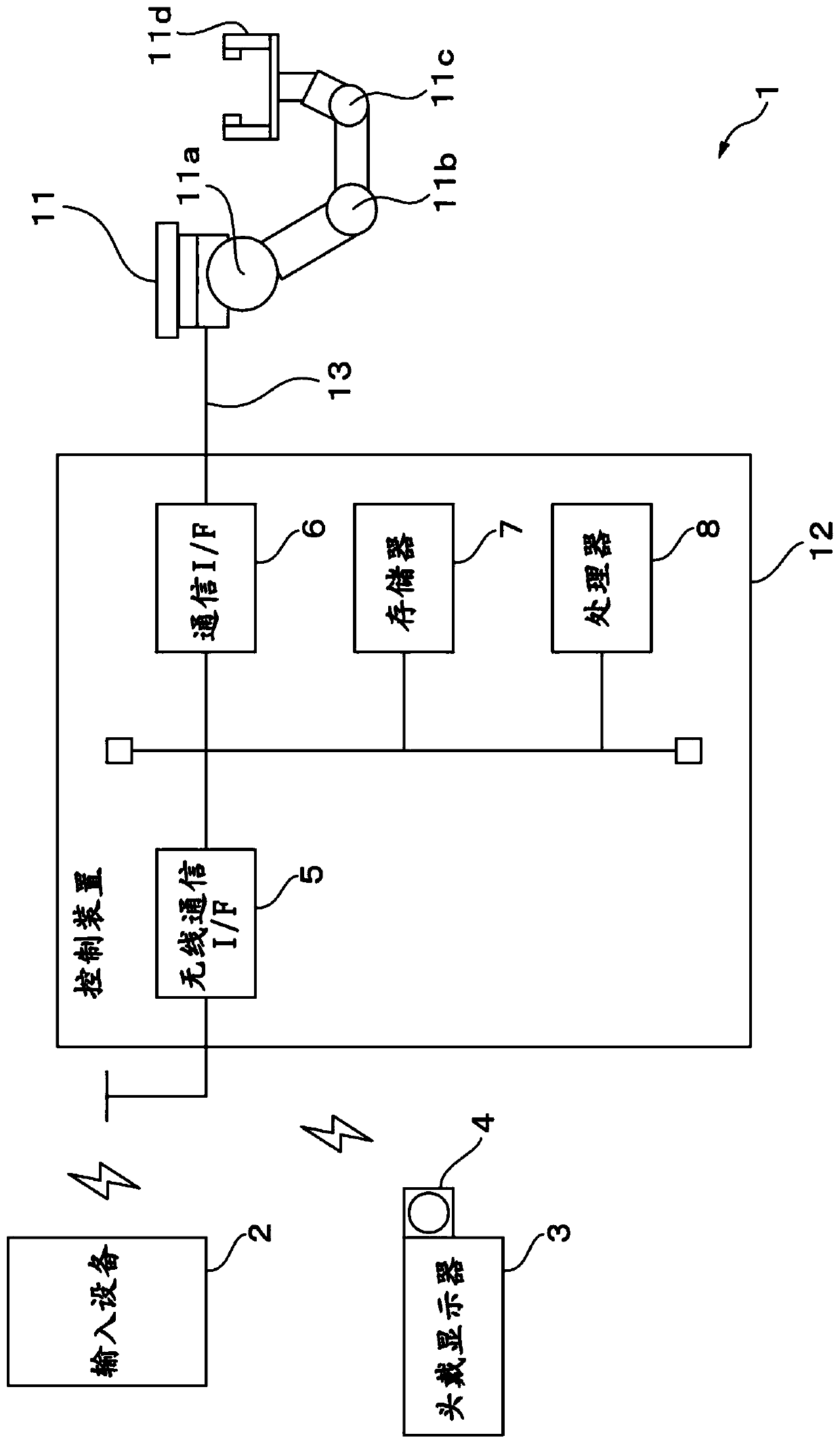
[0017] figure 1 It is a schematic configuration diagram of the cooperative action assisting device. The collaboration assisting device 1 includes an input device 2 , a head-mounted display 3 , a camera 4 , a wireless communication interface 5 , a communication interface 6 , a memory 7 , and a processor 8 . Among them, the wireless communication interface 5 , the communication interface 6 , the memory 7 and the processor 8 are installed, for example, in the control device 12 of the robot 11 to be taught o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com