

A vehicle platoon building map and its adaptive following distance calculation method
A vehicle-to-vehicle self-adaptive technology, applied to vehicle components, vehicle-to-vehicle communication, vehicle wireless communication services, etc., can solve the problems of limited queue flexibility, large errors, and excessive size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0107] The following is a detailed description of the embodiments of the present invention. This embodiment is carried out based on the technical solution of the present invention, and provides detailed implementation methods and specific operation processes to further explain the technical solution of the present invention.
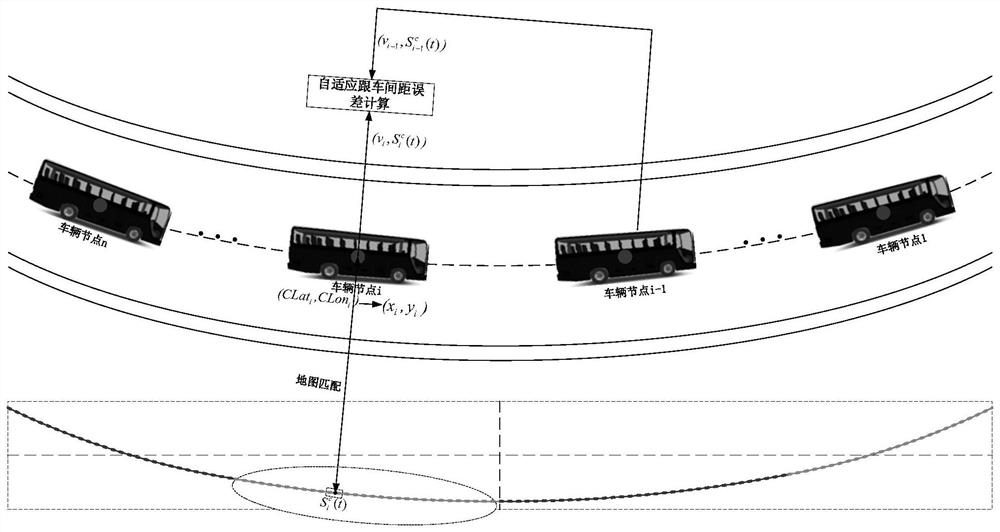
[0108] An embodiment of the present invention provides a vehicle platoon building map and its adaptive following distance calculation method, such as figure 1 shown. Include the following steps:
[0109] Step 1: The map collection vehicle equipped with integrated inertial navigation collects GPS points on the driving path of the vehicle queue, and makes a characteristic map according to the following process:
[0110] Step 1: The map collection vehicle equipped with integrated inertial navigation collects the latitude and longitude (lat k ,lon k ), altitude hei k , heading angle yaw k , the subscript k indicates the kth GPS point recorded, generally...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More