

Work bin handling system and method using lifting robot
A handling system and robot technology, applied in the direction of lifting devices, etc., can solve problems such as inconvenient transportation, limited application locations, and affecting efficiency, and achieve the effects of convenient manual operation, good space adaptability, and saving manpower and material resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
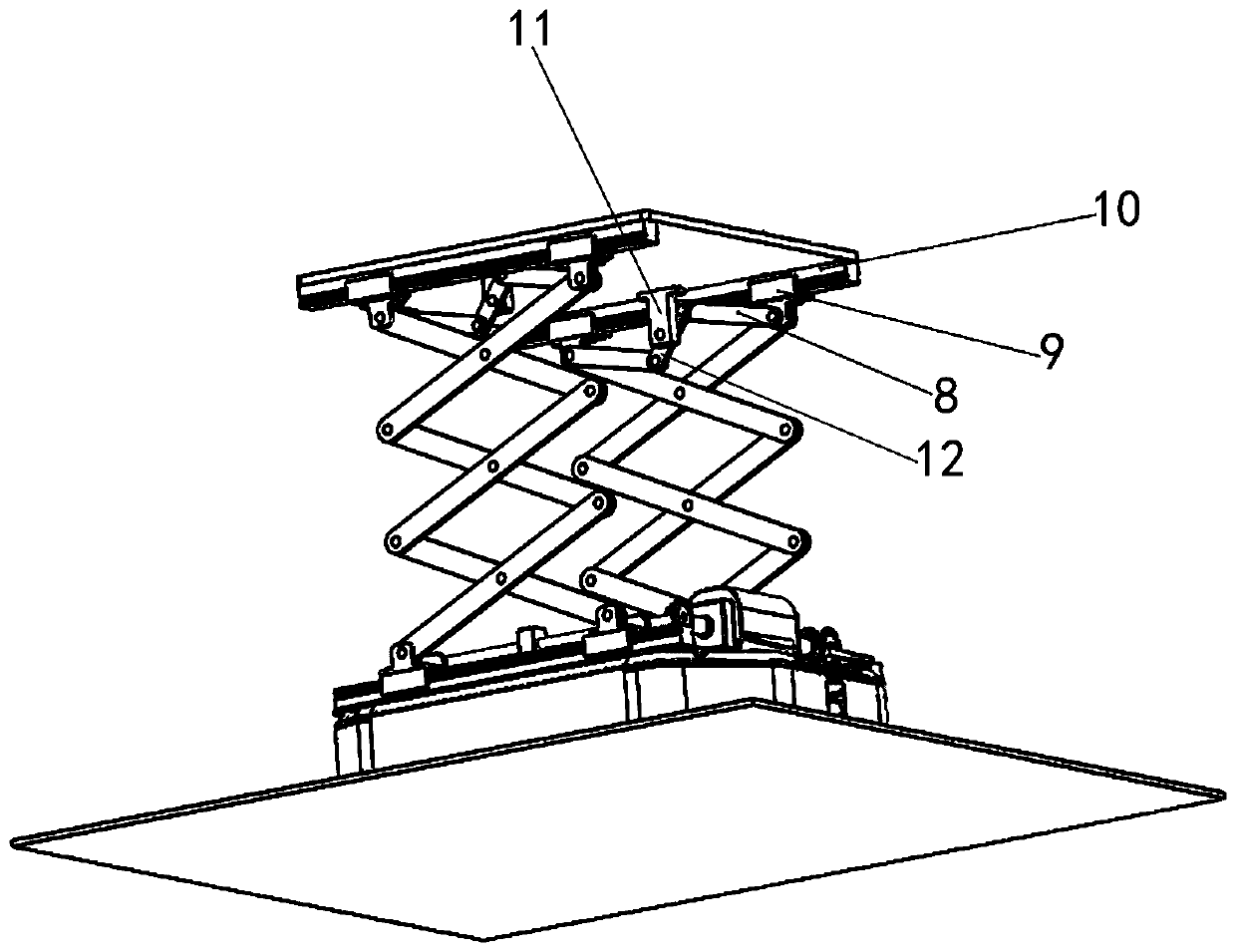
[0059] figure 2 It is a structural schematic diagram of a liftable robot according to an embodiment of the present invention.
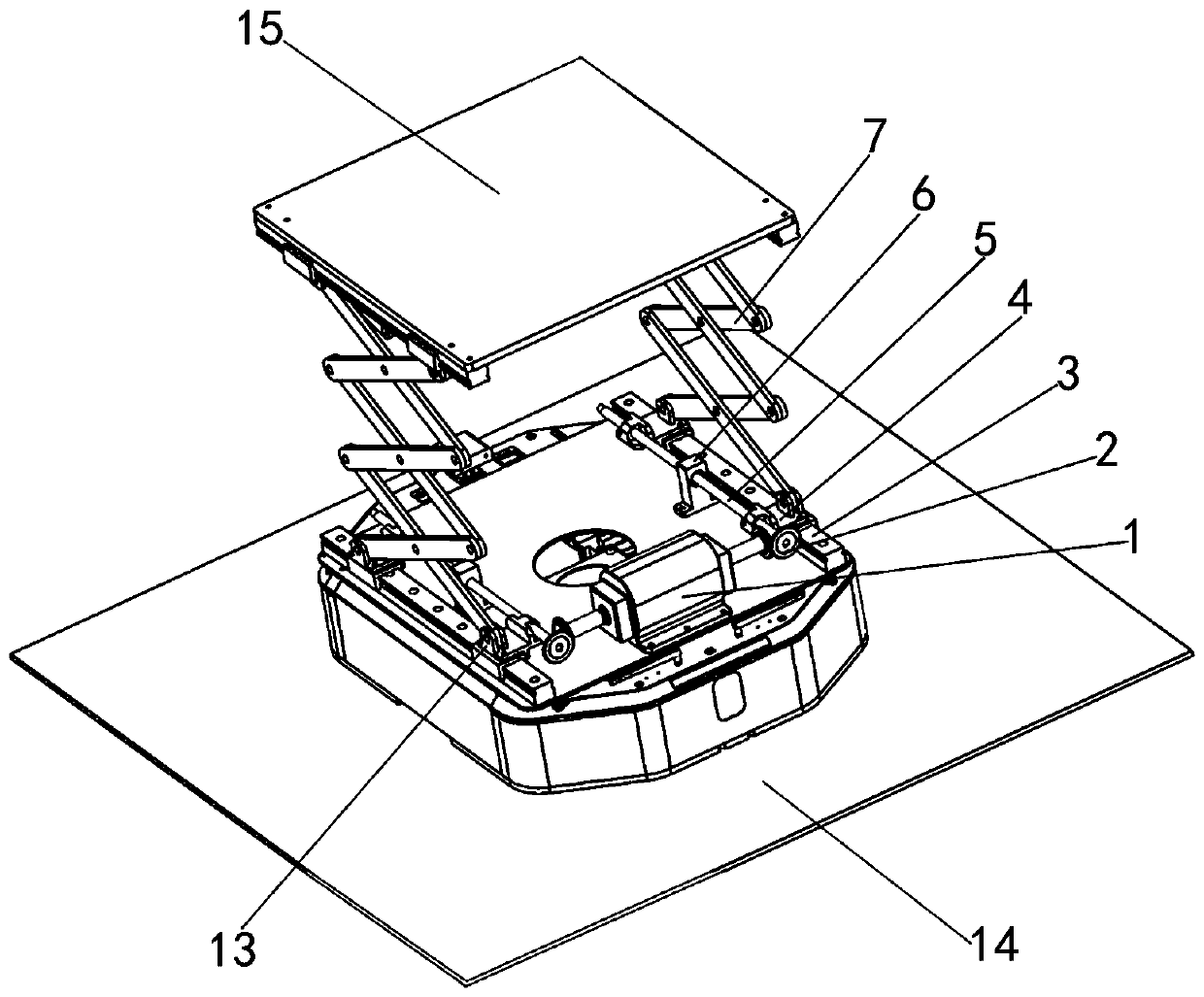
[0060] Such as figure 1 As shown, the liftable robot includes a base plate 14 and a mounting plate 15, the upper end of the base plate 14 is provided with a motor 1 and two double-ended screw mandrels 5, the motor 1 is located on the front side of the base plate 14, and the main shaft of the motor 1 is along the Horizontally arranged, the left and right ends of the main shaft are eac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More