

Guide wire friction force measuring device for interventional operation robot
An interventional surgery and measuring device technology, applied in the field of interventional surgery robot guide wire friction force measurement device, can solve the problems of insufficient force detection of guide wire axial friction force, difficult installation of the force detection device, and inability to meet clinical needs, etc. To achieve the effect of compact structure, simple installation method and avoidance of danger
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
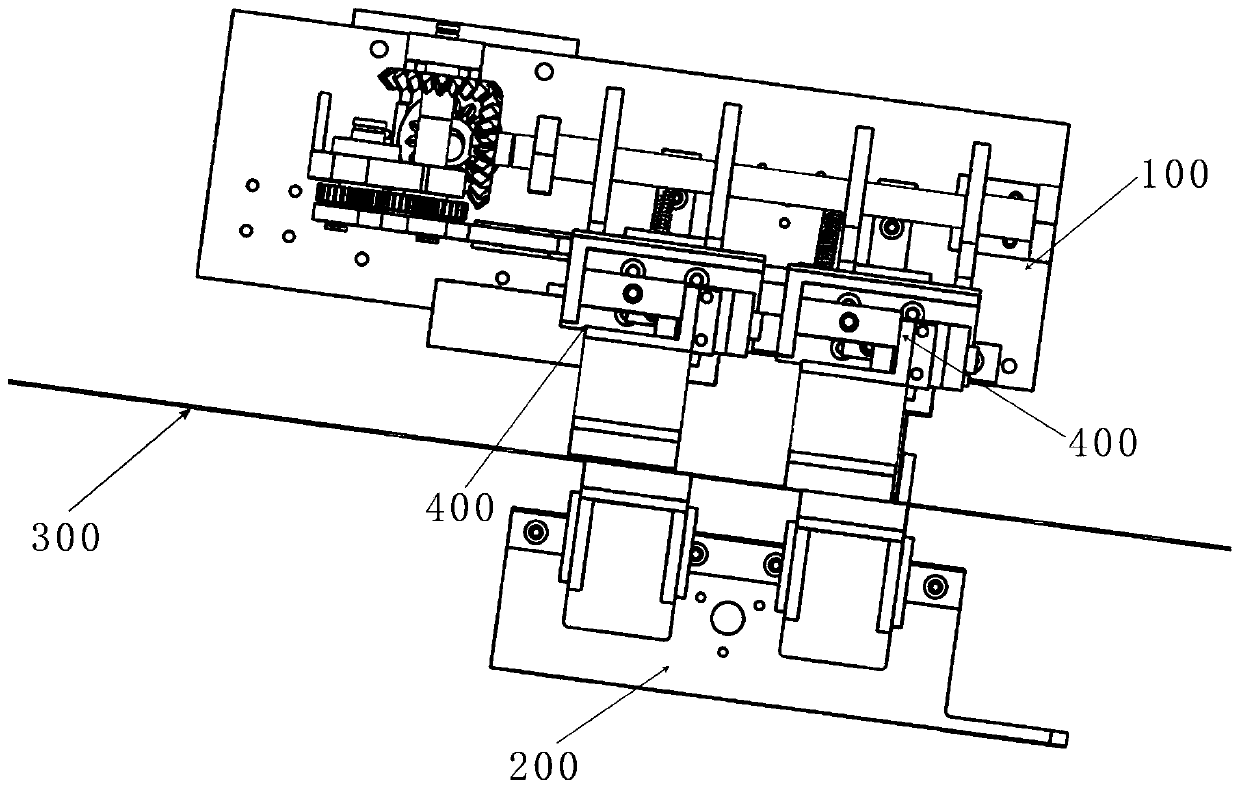
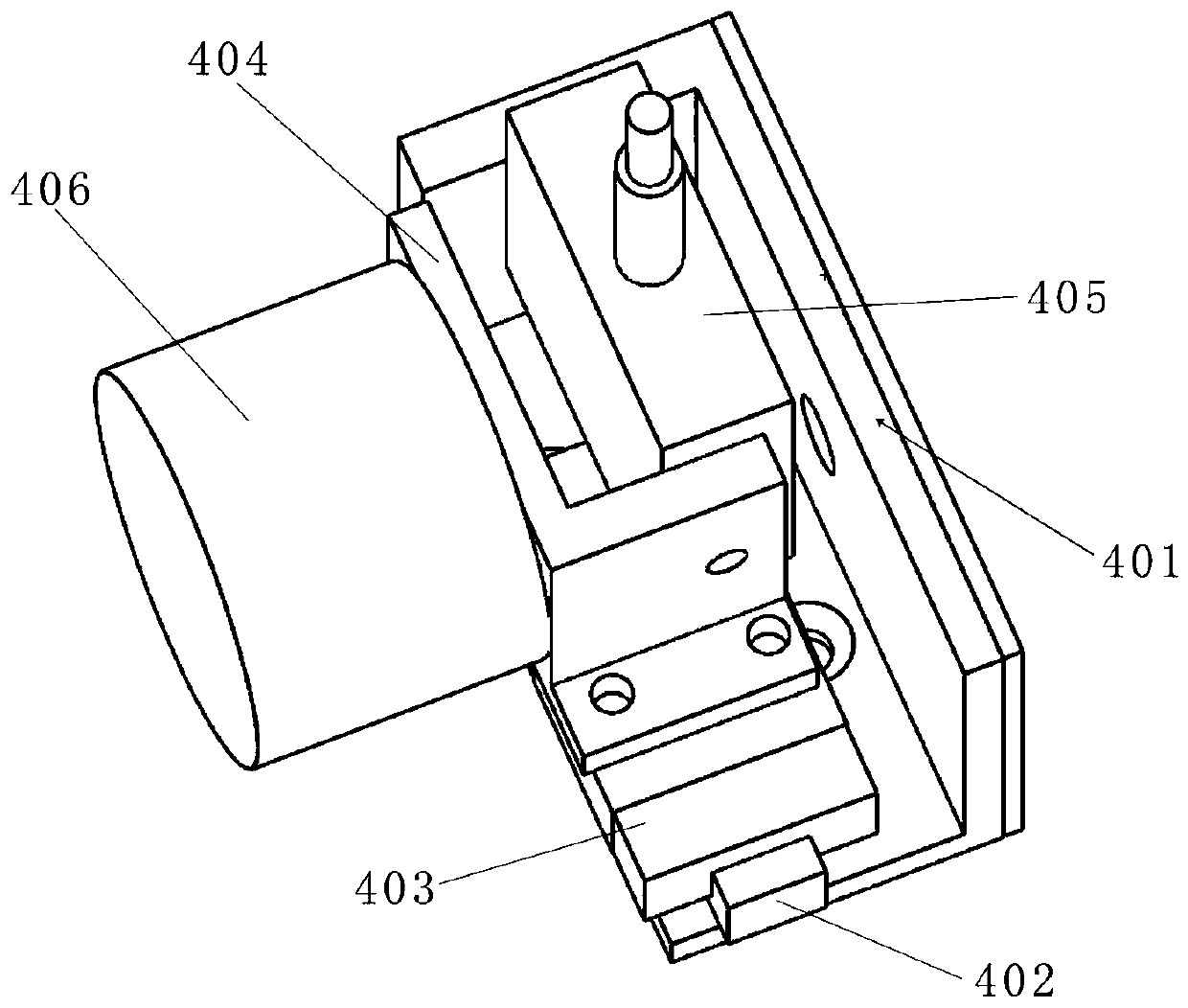
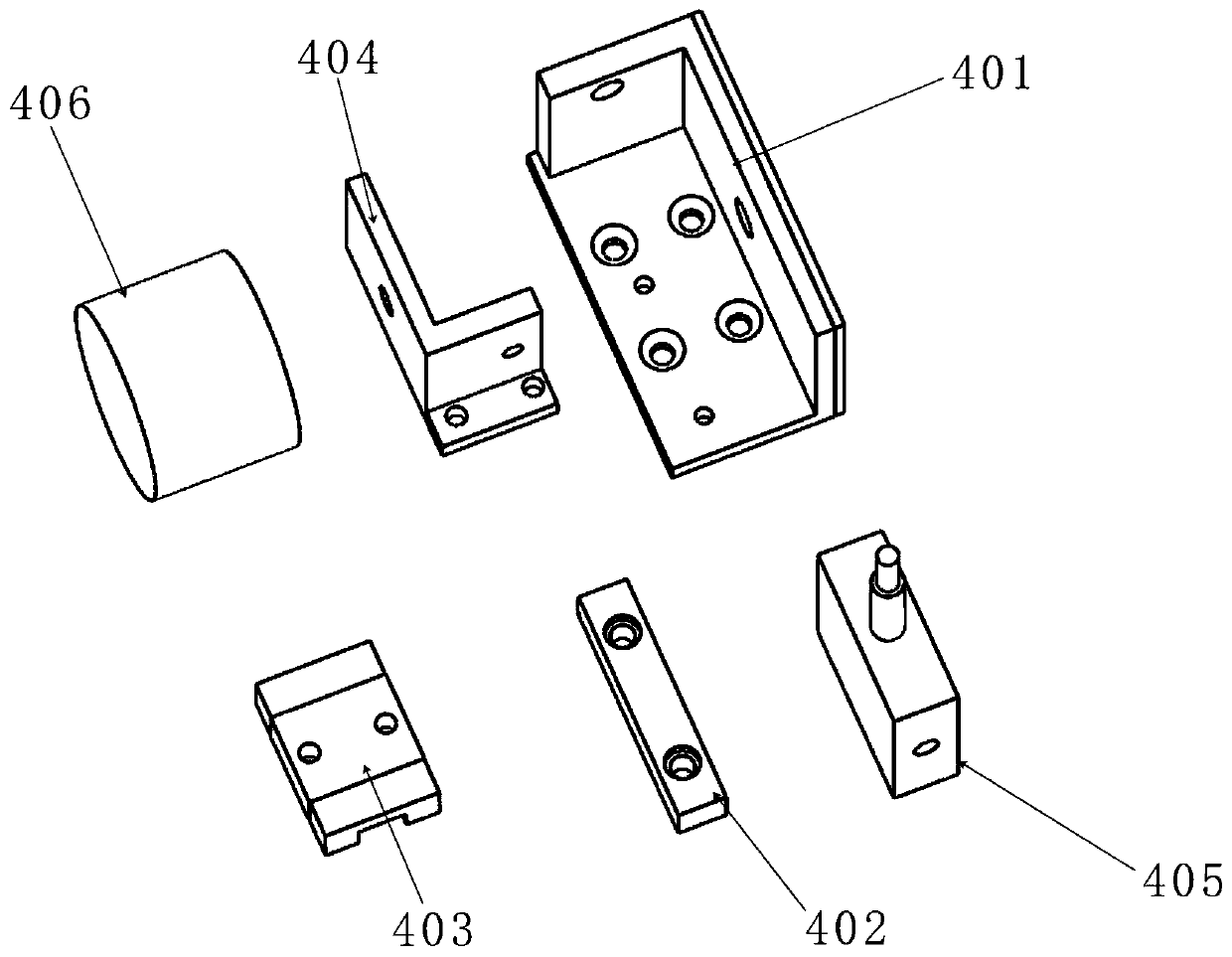
[0041] The following is based on Figure 1-3 A device 400 for measuring the friction force of a guide wire of an interventional surgery robot according to an embodiment of the present invention will be described in detail.
[0042] like figure 1As shown, the embodiment of the present invention discloses a guide wire friction measuring device 400 for an interventional surgery robot, which is installed on the driving end 100 of the propulsion mechanism, and the opposite side of the guide wire friction measuring device 400 for the interventional surgery robot is driven by the propulsion mechanism. end 200, interventional surgery robot guide wire friction measuring device 400 and the driven end 200 of the propulsion mechanism are respectively provided with two groups, the active end 100 of the propulsion mechanism is used to realize alternate clamping of the guide wire 300, and the driven end 200 of the propulsion mechanism is used for The guide wire 300 is clamped with the activ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More