

Robot system reliability analysis method based on Gaussian multi-ellipsoid model
A robot system and analysis method technology, applied in the field of robot system reliability analysis based on Gaussian multi-ellipsoid model, can solve the problems of robot system uncertainty measurement and propagation reliability analysis, and achieve high engineering practical value and high precision , Measure and disseminate accurate effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] Specific embodiments of the present invention will be described in detail below. In order to avoid too many unnecessary details, well-known structures or functions will not be described in detail in the following embodiments. Approximate language used in the following examples is for quantitative representations, indicating that certain variations in quantities are permissible without altering essential function. Unless defined otherwise, technical and scientific terms used in the following examples have the same meaning as commonly understood by one of ordinary skill in the art to which this invention belongs.
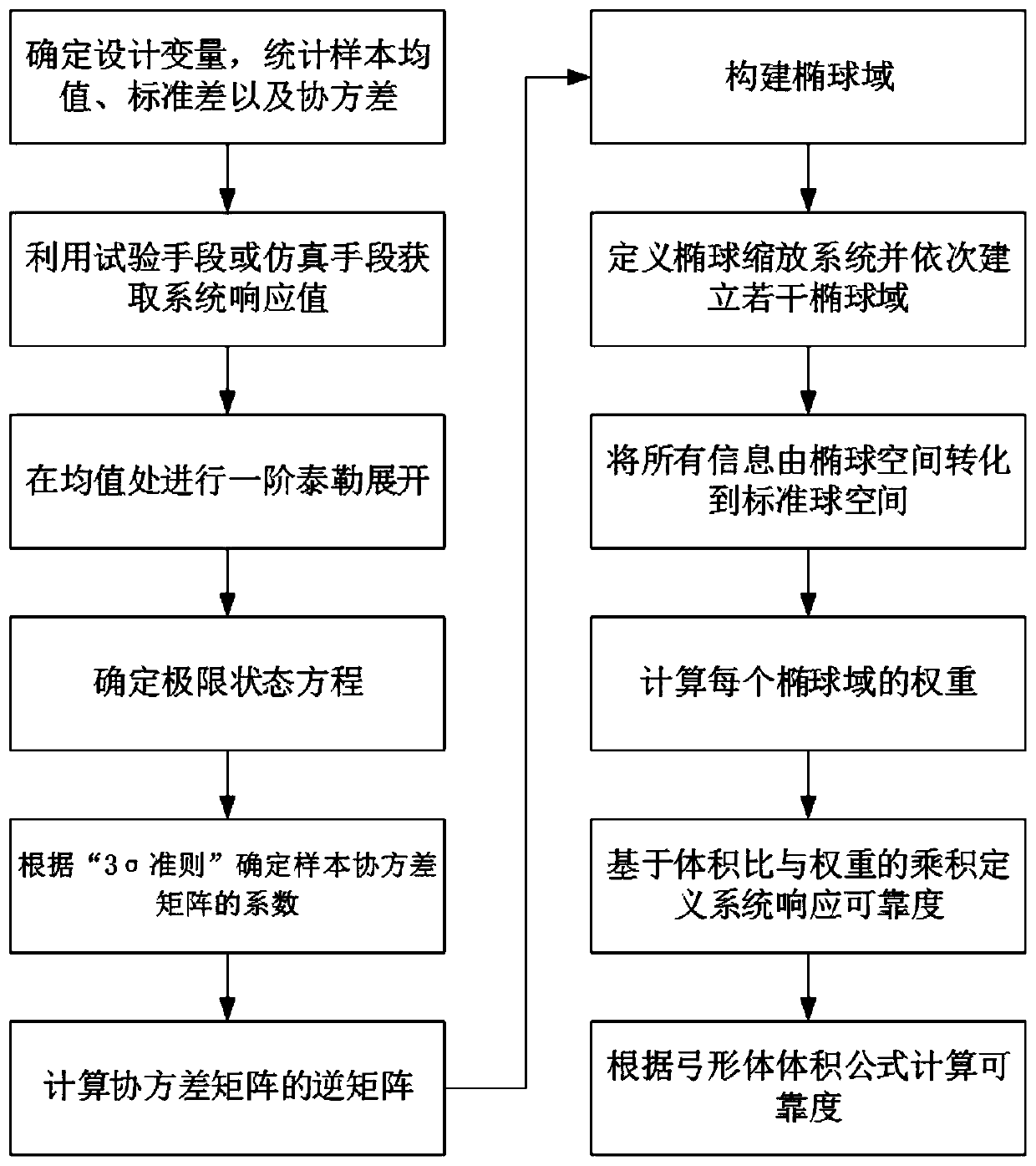
[0045] A reliability analysis method of robot system based on Gaussian multi-ellipsoid model, the flow chart is as follows figure 1 As shown, it specifically includes the following steps:
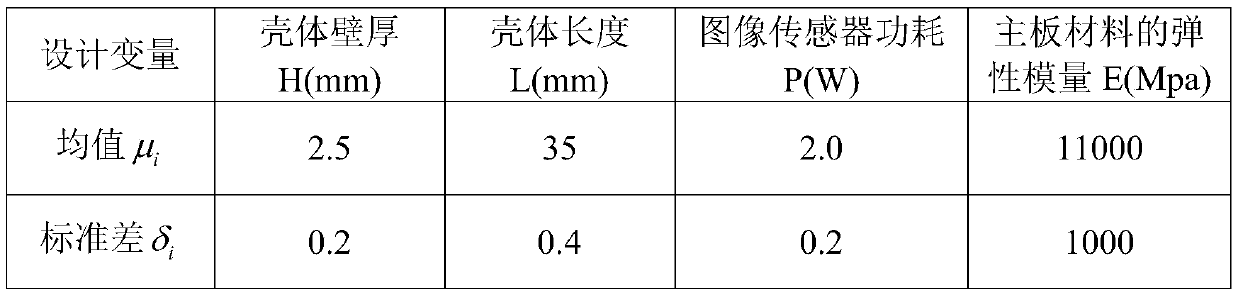
[0046] Step 1: Determine the uncertain parameters of the UAV aerial photography system in the embodiment, including the wall thickness H of the camera housing, the length ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More