

Intelligent vehicle trajectory planning method based on improved artificial potential field
A technology for intelligent vehicle and trajectory planning, applied in vehicle position/route/altitude control, motor vehicle, two-dimensional position/flight control and other directions, which can solve the problem of unreachable local minimum target
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] In order to facilitate the understanding of those skilled in the art, the present invention will be further described below in conjunction with the embodiments and accompanying drawings, and the contents mentioned in the embodiments are not intended to limit the present invention.
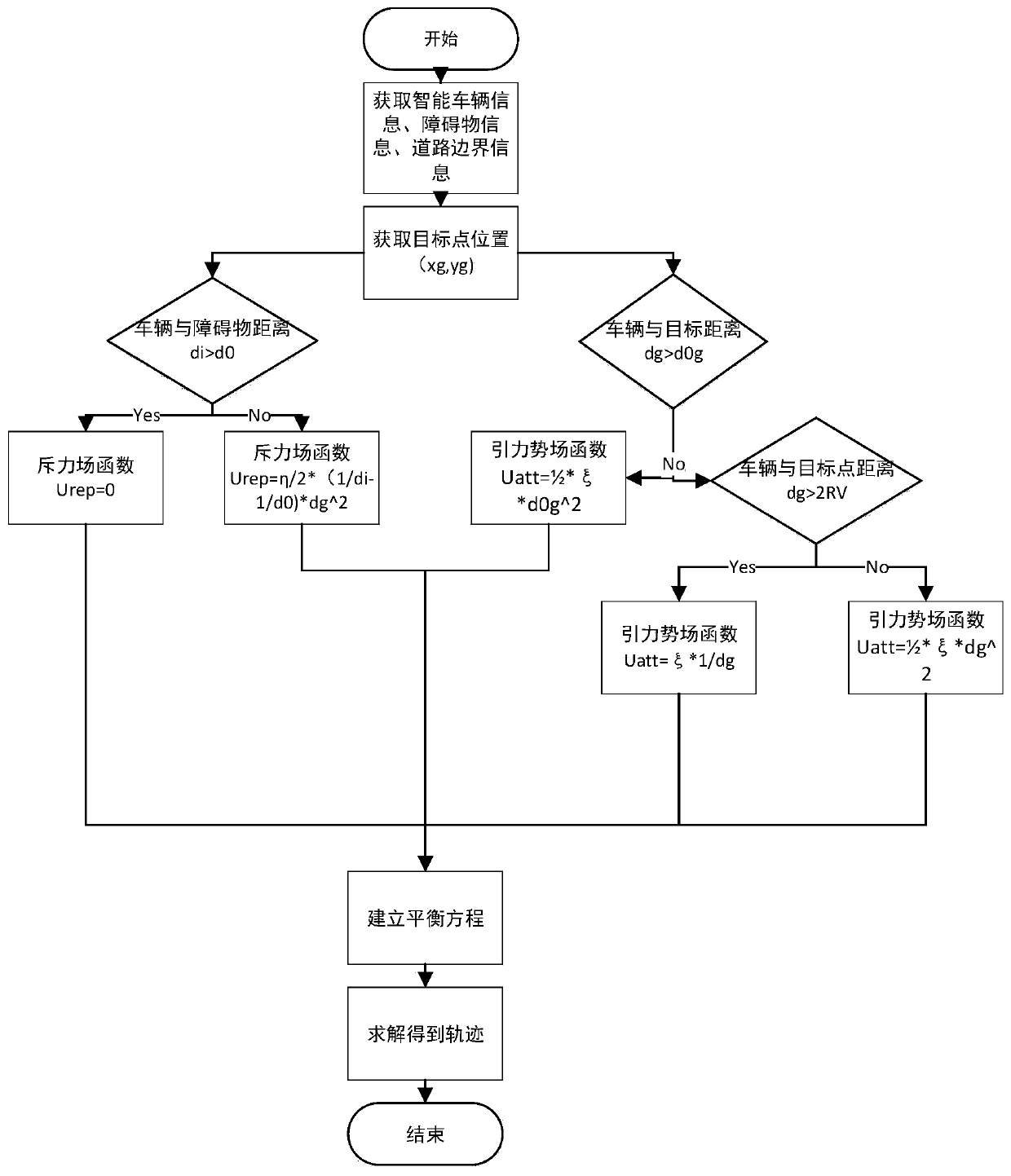
[0051] refer to figure 1 As shown, a kind of intelligent vehicle trajectory planning method based on improved artificial potential field of the present invention, comprises steps as follows:
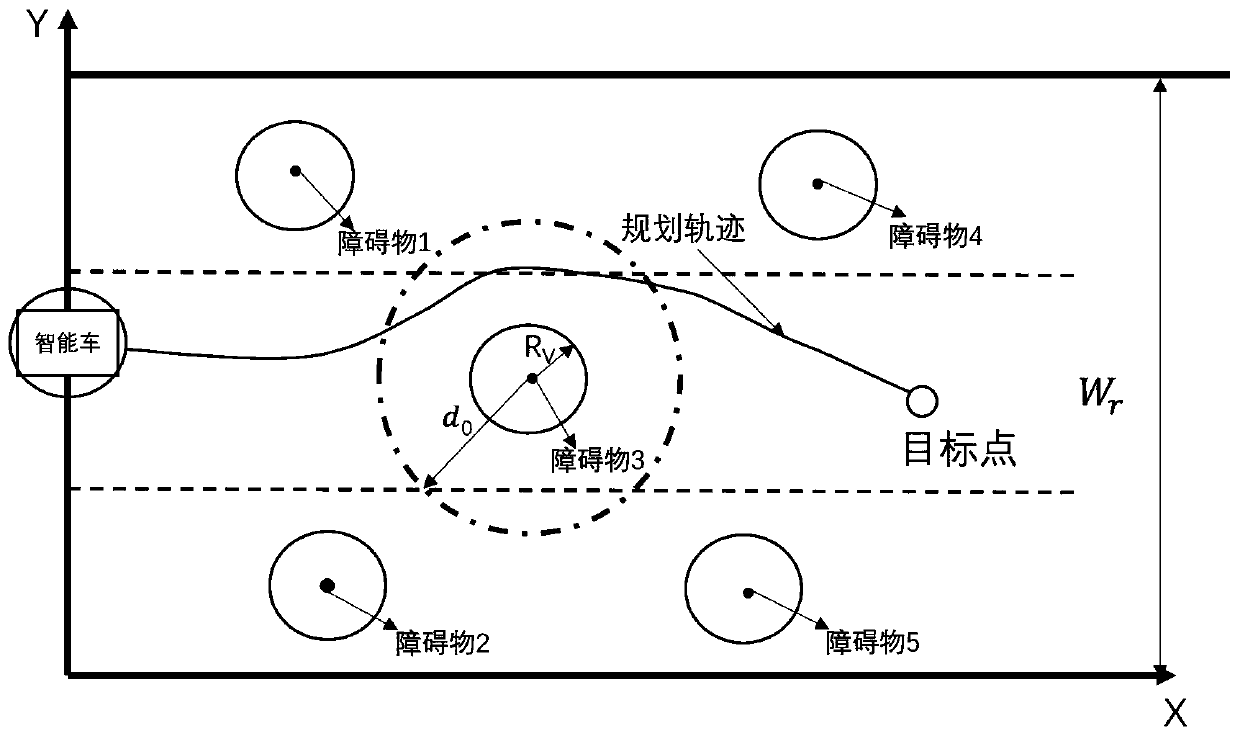
[0052] Step 1: Obtain intelligent vehicle information, obstacle information, and road boundary information through GPS, on-board radar, and on-board camera, and obtain the position of the target point (x g ,y g ); Specifically, the GPS collects the information of the smart vehicle as the position of the vehicle center of mass (x 0 ,y 0 ); the vehicle-mounted radar collects the surrounding obstacle information as the obstacle center position (x obs ,y obs ); the vehicle-mounted camera collects road...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More