

Main manipulator of seven-degree-of-freedom series minimally invasive surgery robot
A robot-driven, minimally invasive surgery technology, applied in the field of medical devices, can solve problems such as poor operational flexibility, and achieve the effects of easy processing and assembly, flexible operation, and good application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
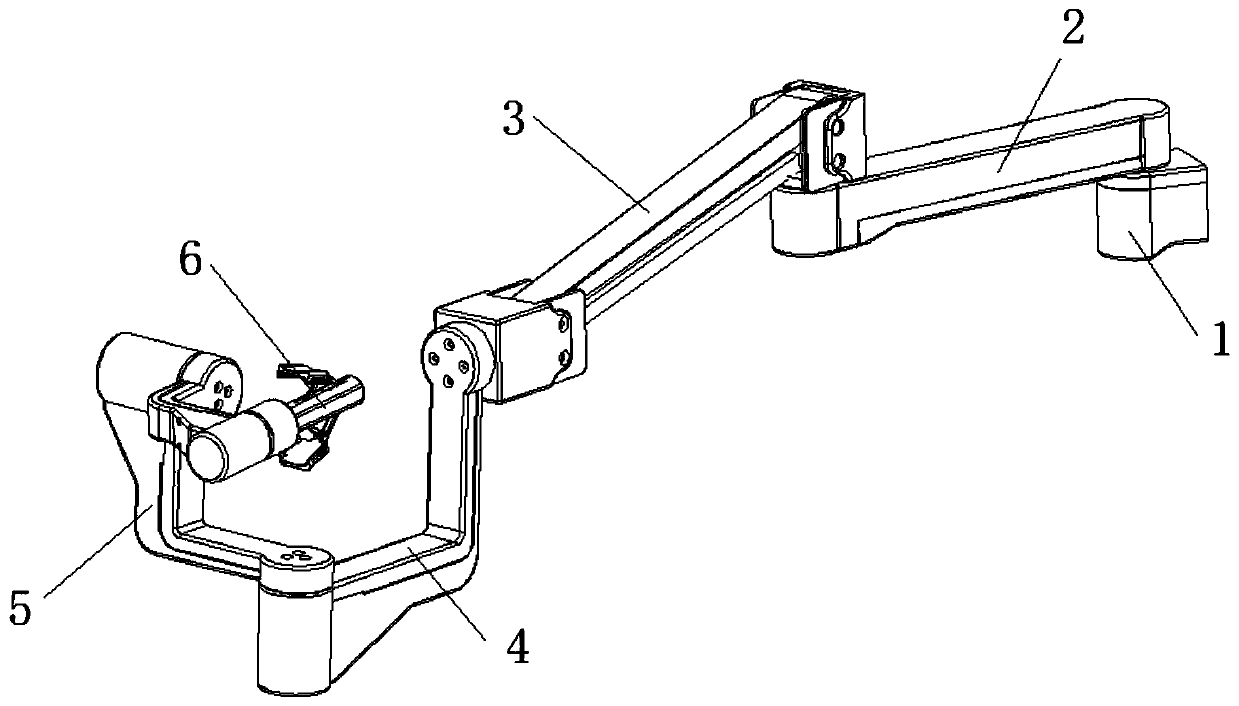
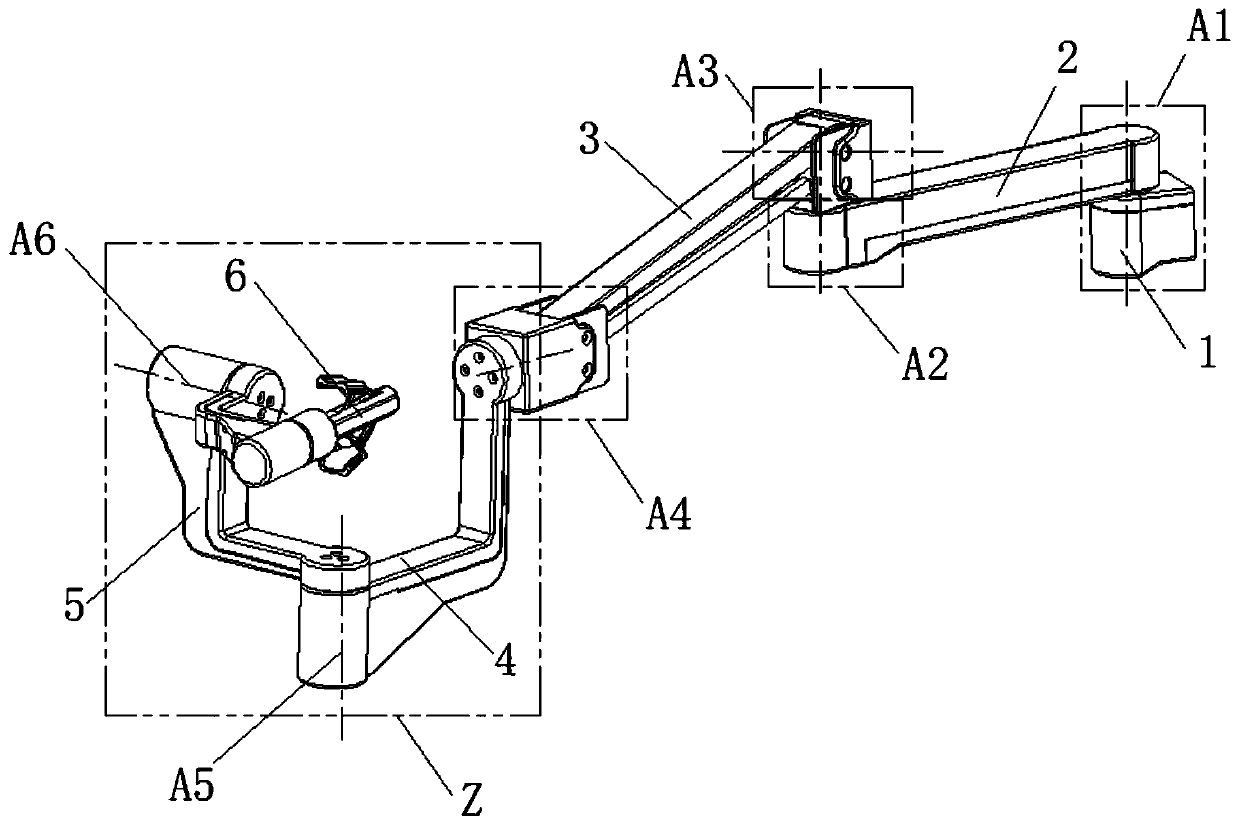
[0027] Embodiment 1: Combining Figure 1 to Figure 6 Illustrating this embodiment, a main operator of a 7-DOF serial minimally invasive surgical robot in this embodiment includes a posture adjustment mechanism Z, which also includes a position adjustment mechanism W, and the position adjustment mechanism W includes a shoulder 1, a large arm 2 and a small Arm 3, the shoulder 1 and one end of the arm 2 are connected in a vertical direction to form a shoulder joint A1, and the other end of the large arm 2 and one end of the forearm 3 are connected in a vertical direction to form an elbow joint A2. The other end of the arm 3 and the posture adjustment mechanism Z are rotated in the horizontal direction to form the wrist joint A4, and the forearm 3 and the elbow joint A2 are rotated in the horizontal direction to form the forearm rotation joint A3, and the posture adjustment mechanism Z is three. Axle interchange.
[0028] The main operating wrist mechanism of the present inventio...
specific Embodiment approach 2
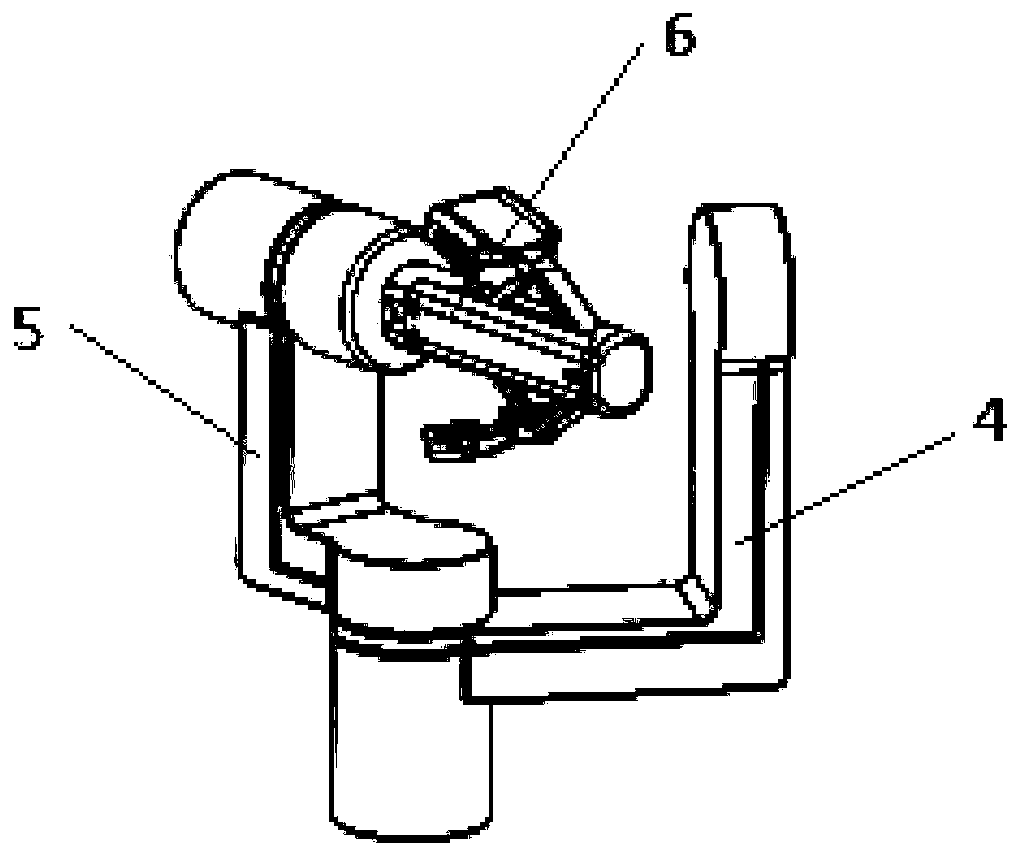
[0030] Specific implementation mode 2: Combining Figure 1 to Figure 6 Describing this embodiment, the posture adjustment mechanism Z of this embodiment includes a first L-shaped frame 4 , a second L-shaped frame 5 and a gripping hand 6 , the upper part of the vertical section of the first L-shaped frame 4 and the end of the forearm 3 The wrist joint A4 is formed by the rotation connection of the first L-shaped frame 4 and the horizontal section of the second L-shaped frame 5 in the vertical direction to form the clamping posture vertical adjustment joint A5. The gripping hand 6 is horizontally and rotatably installed on the gripping hand 6 to form a gripping posture level adjustment joint A6, and the gripping hand 6 is a gripping hand with a gripping degree of freedom. In this way, the arc 8 is easy to cooperate with the pawl. Other components and connection relationships are the same as in the first embodiment.
specific Embodiment approach 3
[0031] Specific implementation three: combination Figure 5 to Figure 6 Describing the present embodiment, the arm 3 of the present embodiment is a parallelogram mechanism. This arrangement is convenient to ensure that the posture of the end of the main operator remains unchanged during the up and down movement of the end of the main operator. Other compositions and connection relationships are the same as in the first or second embodiment.
[0032] The motion principle of the parallelogram mechanism in this embodiment is as follows: Figure 4 and Figure 5 shown. As can be seen from the figure, due to the constraints of the parallelogram mechanism, ab is always parallel to cd when the elbow of the designed main operator performs the pitching motion, which ensures that the wrist is always kept horizontal during the up and down movement of the end of the main operator.
[0033] The parallelogram mechanism of this embodiment ensures that the front and rear ends of the parall...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More