

Mobile robot brain-computer cooperative control method and system based on Petri network
A mobile robot and robot system technology, applied in the field of brain-computer collaborative control of mobile robots, to achieve the effect of improving adaptability and safety, and reducing the burden of thinking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below through specific embodiments.
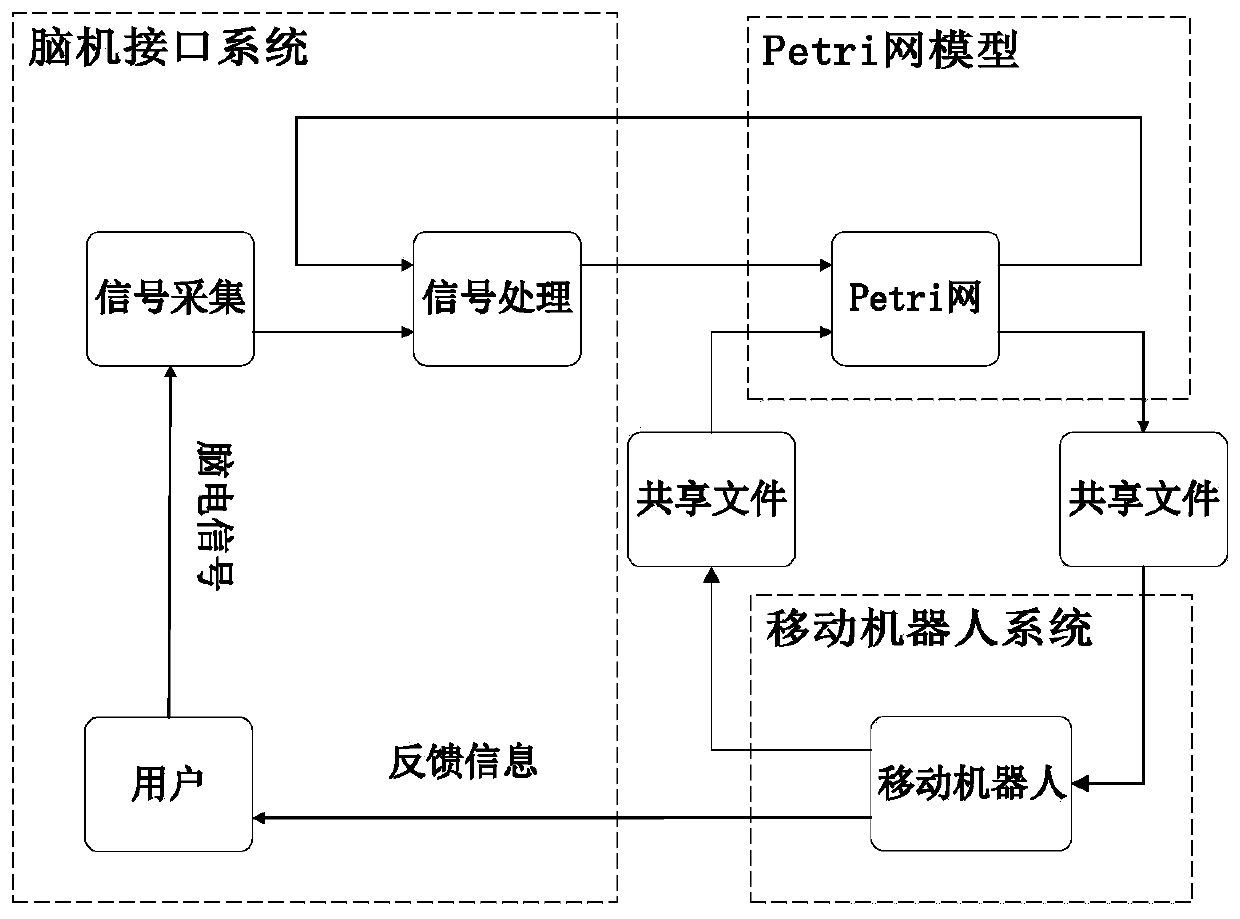
[0037] A method for brain-computer collaborative control of mobile robots based on Petri nets, comprising the following steps:
[0038] Step 1: Collect the original EEG signals in the brain-computer interface system, perform preprocessing, feature extraction, and two-level classification, and obtain at least three types of EEG recognition results: idle, left, and right, and control the mobile robot to go straight and turn left respectively. and turn right. Among them, the first-level classification of the two-level classification identifies idle and non-idle EEG signals, and the second-level classification identifies left and right directions from the non-idle EEG signals.
[0039] Step 2. Build a mobile robot system with at least the functions of going straight, turning left, turning right, avoiding obstacles left, avoiding obstacles right, automatic obstacle avoidance, and cycle con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More