

Unmanned aerial vehicle, tracking method thereof and computer readable storage medium
A drone and tracking model technology, applied in the field of drones, can solve the problem of low tracking accuracy of drones, and achieve the effect of avoiding marking errors and high tracking accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
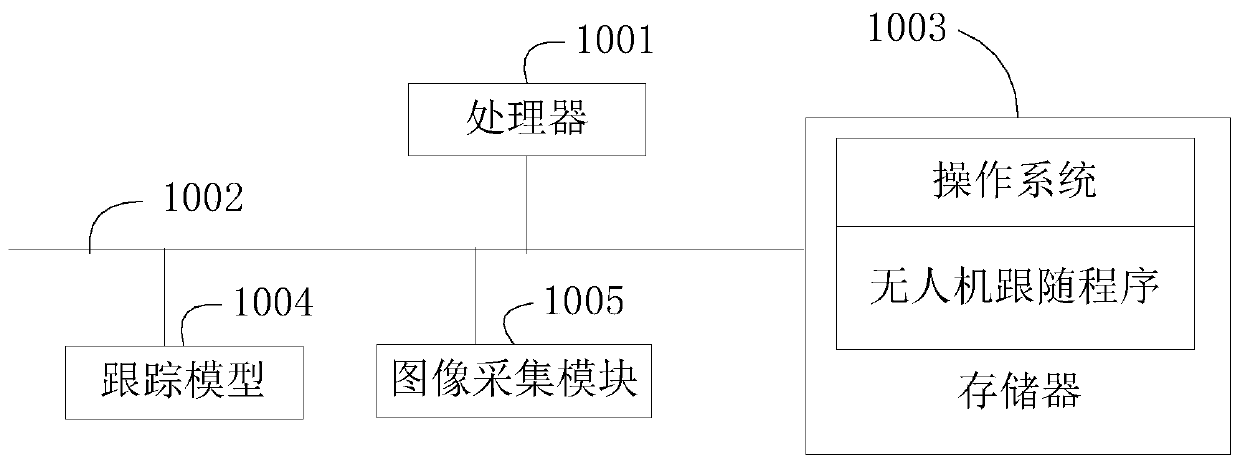
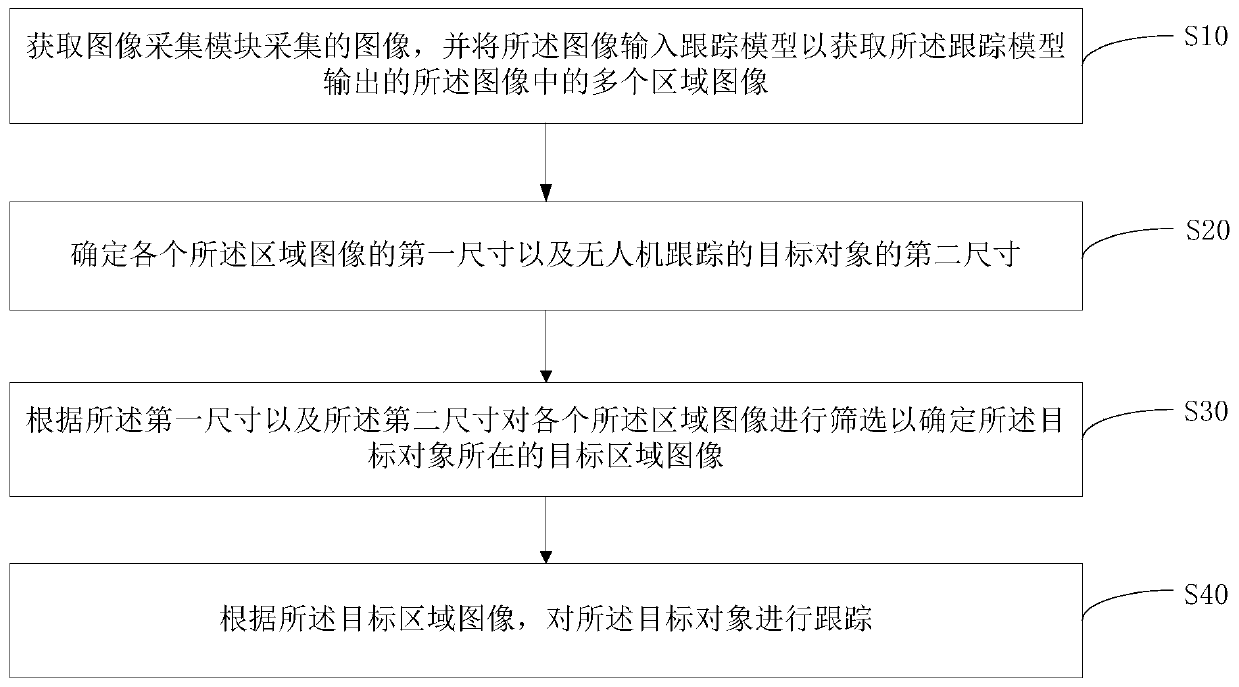
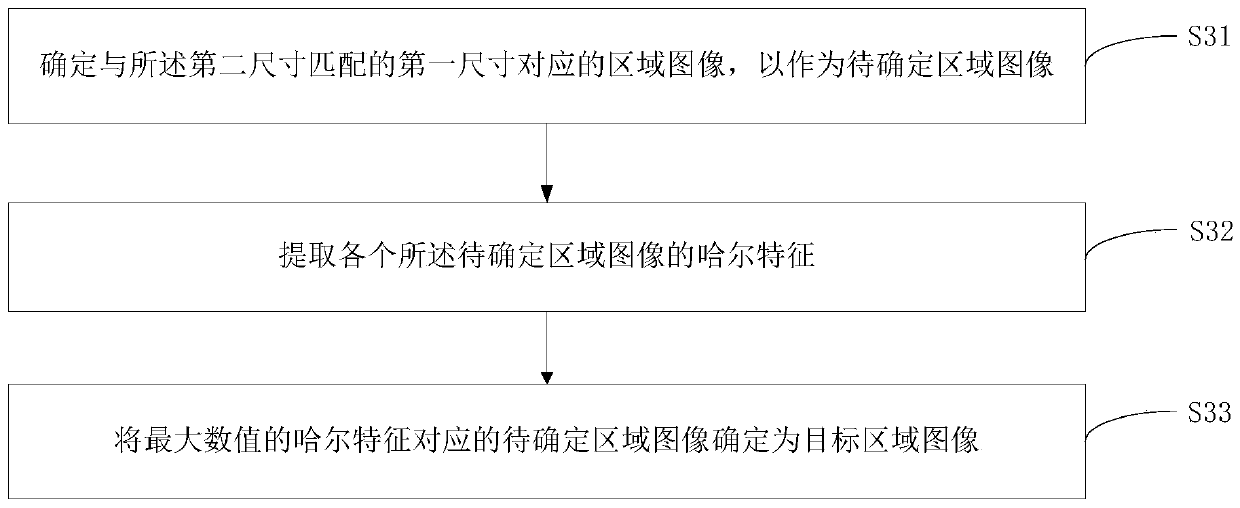
[0045] The main solution of the embodiment of the present invention is to: obtain the image collected by the image acquisition module, and input the image into the tracking model to obtain a plurality of regional images in the image output by the tracking model; determine each of the regional images The first size and the second size of the target object tracked by the drone; according to the first size and the second size, each of the area images is screened to determine the target area image where the target object is located; according to The target area image is used to track the target object.
[0046] Since the UAV directly determines the area where the target object is located based on the collected images when following the target object, there is no need to manually select the area, which avoids marking error...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More