

A Path Planning Method for Electric Vehicles with Time Window
A path planning, electric vehicle technology, applied in data processing applications, forecasting, instruments, etc., can solve the problems of slow solution process, low stability, low solution quality, etc., to expand the search space, promote information exchange, improve The effect of the quality of the solution
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
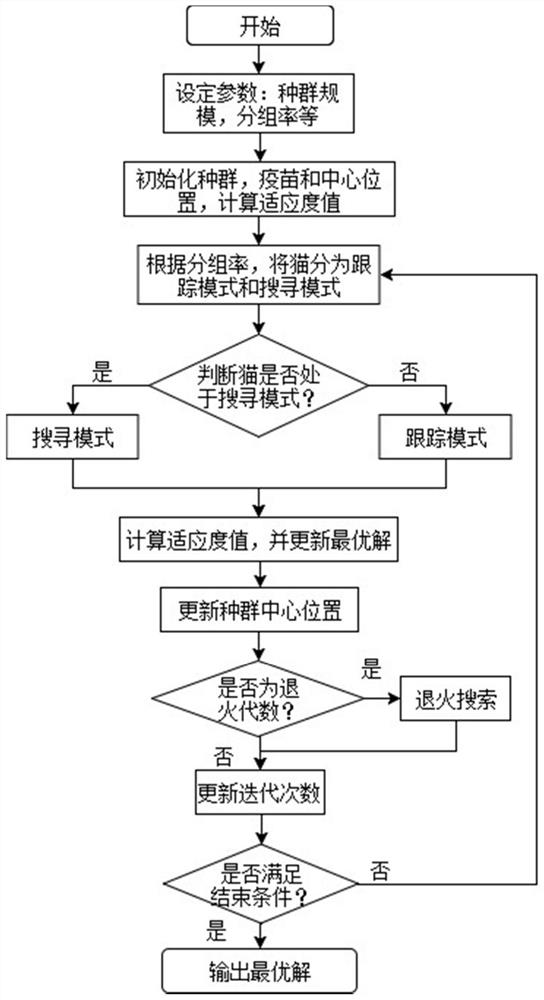
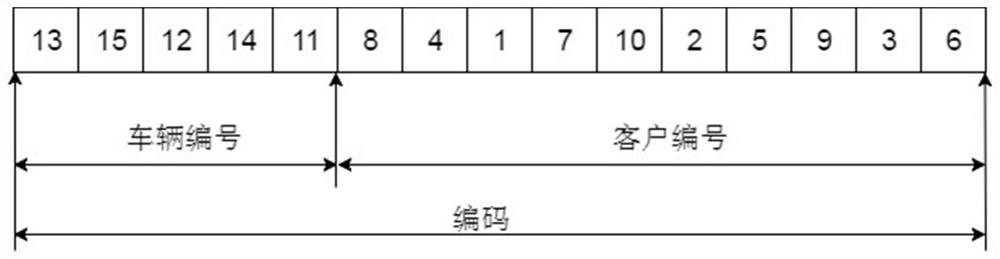
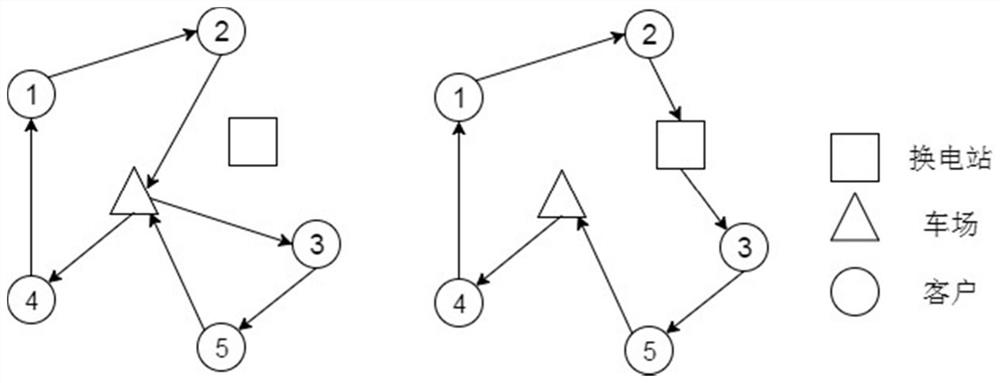
[0110] The present invention will be further described below with reference to the accompanying drawings. Figure 1 to Figure 5 , a method for planning a path of an electric vehicle with a time window of the present invention, the method steps are as follows:
[0111] Step 1, set the relevant parameter variables and build the model:
[0112] M: number of customers;
[0113] K: the number of vehicles;
[0114] N: number of charging stations;
[0115] c k1 : fixed usage cost of vehicle k;
[0116] c k2 : variable cost of vehicle k;
[0117] Q k : rated load of vehicle k;
[0118] D k : the rated mileage of vehicle k;
[0119] d ij : the distance from node i to node j;
[0120] q i : the demand of node i;
[0121] t 0 : departure time of all vehicles;
[0122] the time when vehicle k arrives at node i;
[0123] the time when vehicle k leaves node i;
[0124] t i : time spent at node i;
[0125] [t i1 , t i2 ]: service time window of node i;
[0126] v: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More