

Target following and dynamic obstacle avoidance control method for differential slip steered vehicles
A dynamic obstacle and skid steering technology, applied in vehicle position/route/height control, non-electric variable control, two-dimensional position/course control, etc., can solve the problem of discounting training effects and little room for improvement in control accuracy , unable to effectively solve problems and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0110] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be further described in detail below with reference to the embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
[0111] In view of the problems existing in the prior art, the present invention provides a target following and dynamic obstacle avoidance control method for a differential slip steered vehicle. The present invention is described in detail below with reference to the accompanying drawings.
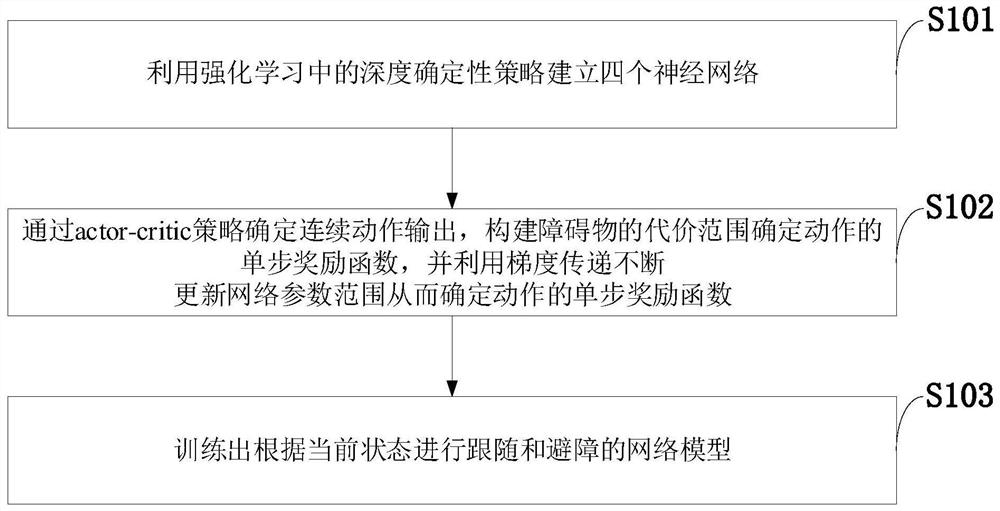
[0112] like figure 1 As shown, the target following and dynamic obstacle avoidance control method of the differential slip steered vehicle provided by the embodiment of the present invention includes the following steps:
[0113] S101: Build four neural networks using deep deterministic strategies in reinforcement learning;
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More